HYPER-DOLPHIN
Overview
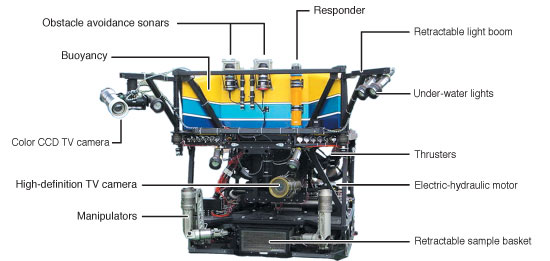
HYPER-DOLPHIN is a remotely operated vehicle completed by Canada in 1999, which is able to conduct surveys at a maximum depth of 4,500m. Equipped with a ultra-high-sensitivity high-definition TV camera, the vehicle has facilitated visual and filmed surveys in the deep sea. Samples on the ocean floor can also be collected by the two manipulators (mechanical arms) on the vehicle.
Systems
Images of Deep-sea Organisms by HYPER-DOLPHIN
Off Okinawa


Off Sanriku, Northern Honshu


Suruga Bay and Sagami Bay




High-definition TV camera (HYPER-DOLPHIN)
This camera integrating an ultra high sensitive super HARP tube can get dynamic high-definition images of deep-sea. The combination of the chip to process all signals and various components such as memories, the signal processing, tranformation, etc. achieves a very compact camera driven by low power. The images shot by this camera are transformed through a 3,300 m optic fiber cable between the camera of the vehicle and the control room on board.


Principal specifications