SHINKAI 6500
Overview
SHINKAI 6500 is a manned submersible that can dive to depths of 6,500 meters – deeper than any other manned submersible for academic research all over the world today. In 1991, SHINKAI 6500 began its mission to study seafloor topography and geology and research deep-sea organisms in the Pacific Ocean, Atlantic Ocean, and Indian Ocean as well as the sea around Japan.
In March 2012, JAMSTEC completed the major upgrade of SHINKAI 6500, which was the largest scale since its launch.
The original main swing-type aft thruster was replaced by two middle-sized fixed-type aft thrusters, and an additional horizontal aft thruster was installed so that the submersible can turn quickly and smoothly. Motors for all thrusters, a hydraulic pump and a sea-water pump were also replaced by new motors for better response, acceleration and braking performance.

Mission
- Ascertain Movements in Earth's Interior
We investigate phenomena that have a great influence on movements of the Earth's interior such as plate subduction zones where major earthquakes occur and mid-oceanic ridges where new crust is formed, and clarify the way in which the Earth was formed.
- Clarify Evolution of Living Organisms
To date, explorations in the deep sea have revealed a wide range of extremely-unique biological communities and chemosynthetic ecosystems. Chemosynthetic ecosystems are ecosystems that have virtually no dependence on solar energy and where chemosynthetic bacteria produce organic materials, using hydrogen sulfide and methane in water expelled from the interior part of the Earth as their energy source. It is hoped that studying these deep-sea ecosystems will help clarify the origins and evolutionary processes of living organisms.
- Utilize and Conserve Deep-Sea Organisms
In order to solve food security and other issues that humanity will face in the future, sustainable utilization of deep-sea biological resources and research on gene resources of deep-sea organisms which exhibit a diverse range of physiologies, are required.
- Elucidate Thermal and Material Cycles
The history of global environmental changes, including climatic variations and the intensification and attenuation of tidal currents, is recorded in the various types of sediments deposited on the seafloor. SHINKAI 6500 is used to collect samples of such sediments for analysis.
Heat and materials expelled as a result of hydrothermal activity on the seafloor have had a definite impact on the global environment. Understanding hydrothermal systems in the deep sea will contribute to further understanding of global environmental changes.

Systems
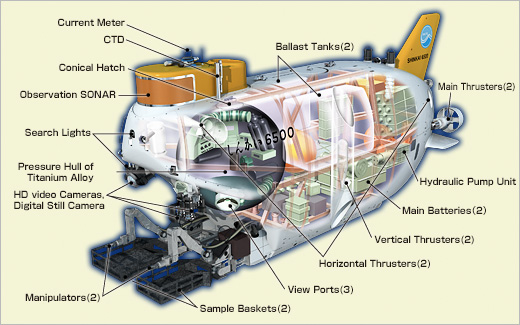
Pressure hull
The inhabitable space of SHINKAI 6500 is in the pressure hull that has an internal diameter of 2.0 m. This space can accommodate two pilots and one researcher during research surveys. Various types of instruments are also installed in the pressure hull, making the inhabitable area even smaller.
The 73.5 mm thick hull was constructed from a strong, light-weight titanium alloy. Pressure at a depth of 6,500 m reaches around 681 atmospheres, meaning that even a slight warping of the hull can lead to structural collapse. Therefore, the hull is made as spherical as possible with the discrepancy in the hull diameter of less than 0.5 mm at any point.


Buoyant material
The buoyant material must be less dense than seawater, and at the same time must be able to withstand a high level of water pressure.
SHINKAI 6500 uses a buoyant material known as syntactic foam. Syntactic foam is produced by embedding hollow glass spheres (mainly two kinds, one having the diameter of 88 to 105 micrometers, and the other having the diameter of 40 to 44 micrometers) into high strength epoxy resin which guarantees sufficient strength and buoyancy even at high water pressure.
Manipulators
The manipulators are used to collect samples of organisms, rocks and other objects on the seafloor. They can lift an about 100 kg object in water.
View ports
SHINKAI 6500 features three view ports, one at the front, and each on the left and right sides. The pressure hull may deform a little under high water pressure even though it has a robust construction. Highly-transparent methacryl resin is used for the view ports to respond to the possible deformation. Composed of three resin panels, each view port has a convex shape with a total thickness of 138 mm.

Main batteries
SHINKAI 6500 was originally equipped with zinc silver batteries, but in 2004, they were replaced with lithium ion batteries. The new maintenance-free batteries with longer life achieved downsizing and easier maintenance, which resulted in better cost-performance.
Search lights
Virtually no sunlight reaches a depth of 200 m, making the deep sea an absolutely pitch black environment. Each search light on SHINKAI 6500 is as bright as three or four powerful car headlights combined. All of these seven search lights provide a visual range of only around 10 m even in a favorable seawater condition without suspending materials.

A day-long 6,500 m deep-sea survey
- 7:00 am
Operations start.
- 8:30 am
Vehicle launches.
- 9:00 am
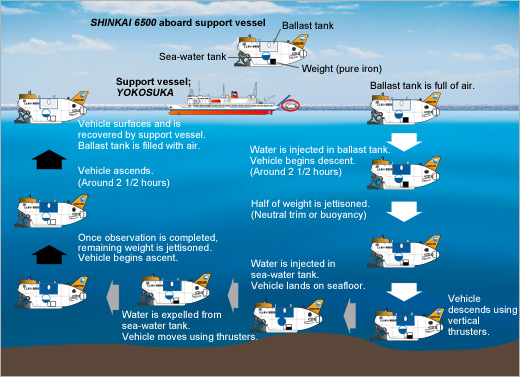
Vehicle starts diving.
The vehicle descends at a rate of 45 m per minute. Therefore, it takes around two and a half hours to reach a maximum depth of 6,500 m.
- 11:30 am
Vehicle lands on seafloor and starts survey.
The operating time is set to 8 hours per day including descending and ascending hours. Therefore, how long the vehicle conducts survey depends on the descending and ascending hours. The shallower the destination is, the more time the vehicle can spend for survey.
- 2:30 pm
Vehicle departs and ascends.
The vehicle ascends at the same rate as it descends. Therefore, it takes around two and a half hours to reach the surface.
- 5:00 pm
Vehicle surfaces and is recovered by support vessel.
Battery charging, maintenance and equipment setup are conducted during night hours for the following day's operations.
Principal specifications
* Figures of the old system are shown in brackets.
Digital Acoustic Image Transmission System