September 14, 2011
JAMSTEC
JAMTEC Invites Names for New Autonomous Underwater Vehicle
JAMSTEC is pleased to invite the public to submit names for the new autonomous underwater vehicle (AUV), which is currently being developed and constructed at JAMSTEC. The naming contest is designed to enhance public understanding of the development of the new AUV and its importance in facilitating underwater research and exploration.
Submission guidelines:
| 1. |
The AUV is an unmanned autonomous underwater vehicle. Construction is taking place and scheduled to be completed by the end of March 2012. (Please refer to Appendix for specification) |
| 2. |
All submissions should be sent between Thursday, September 15th and Wednesday, November 30th, 2011, via the following link. http://www.jamstec.go.jp/j/jamstec_news/auv_naming/ *Other forms of submission will be ignored.
|
| 3. | From October 1st, all entries will be made available online for public voting. A selection committee, consisting of JAMSTEC staff and experts from research areas, will decide on the winning name, taking the public vote into consideration. |
| 4. |
Eligible entries
*Submissions from overseas may not be included in the draw.
|
| 5. |
The name's author Among the winners, one winner will be chosen as the author of the name. With the author's consent, his or her name may be referred to in the future promotion of the AUV. |
Appendix
New Autonomous Underwater Vehicle

Image of the outward appearance of the new AUV
(The actual colors may differ from this image)
Specifications
| Maximum depth capability | 3,000 meters |
|---|---|
| Speed | Cruising speed: 2 to 3 knots (about the average human walking speed) |
| Length | 5 meters (about the size of a white whale) |
| Operation | Autonomous or acoustic control (wireless, remotely operated from the support ship) |
| Science operations |
|
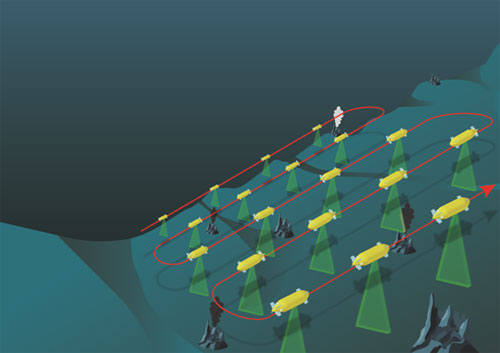
Image of the survey by the new AUV
- -
- The AUV is preprogrammed to perform surveys along the seafloor. It is able to determine its own location and to cruise safely over rough surfaces of the seafloor.
- -
- Fore and aft X-ladders enable easy changes in direction and keep the AUV on course regardless of the current.
- -
- Acoustic signals transmitted by the AUV and reflected from the seafloor provide information on the seafloor topography and sub-bottom structure. The collected data will be used for detailed surveys using other seafloor explorers.
Contacts:
- Japan Agency for Marine-Earth Science and Technology
(For the results) - Kyohiko Mitsuzawa, Manager
Public Relations Division
Advanced Research and Technology Promotion Department
- (For publication)
-
Hikaru Okutsu, e-mail: press@jamstec.go.jp
Senior Administrative Specialist, Planning Department Press Office