Press Releases
JAMSTEC
Graduate School of Science and Faculty of Science,
Tohoku University International Research Institute of Disaster Science,
Tohoku University
Success in multi-point long-term observations of sea floor crustal movements using an unmanned surface vehicle
-Major progress in developing a high-temporal-resolution understanding of the current state of Seismogenic zone -
1. Key points
- ◆
- Using an autonomous sea surface vehicle with automatic navigation, data were successfully recorded by patrolling 14 seafloor crustal movement observation points along the Japan Trench over a period of approximately 40 days.
- ◆
- The use of autonomous surface vehicles can significantly reduce the cost of GNSS-acoustic positioning coupled with observations of submarine crustal movements, which have thus far necessitated the use of ships.
- ◆
- It is now realistic to increase the frequency of observations, and the detection of changes in interplate locking and slipping over time along shallow plate boundaries (i.e., near trench axes) can be expected.
2. Overview
A team led by Dr. Takeshi Iinuma, at the Japan Agency of Marine–Earth Science and Technology (JAMSTEC) Research Institute for Marine Geodynamics, along with Prof. Ryota Hino of the Tohoku University Graduate School of Science and Prof. Motoyuki Kido of the Tohoku University International Research Institute for Disaster Science (IRIDeS), developed a system to perform Global Navigation Satellite System (GNSS*)-acoustic positioning coupled with observations of submarine crustal movement (Fig. 1; hereinafter “GNSS-A observations”) using an autonomous sea surface vehicle, “Wave Glider” (Fig. 2). By having the Wave Glider patrol multiple observation points, the team succeeded in automatically acquiring observation data at many points in just over a month (Fig. 3).
In the past, GNSS-A observations have necessitated the use of research vessels or moored buoys, such that high operating costs have limited the enhancement of observation systems. However, with the realization of observations via Wave Glider, it is now possible to reduce the cost per observation to 1/10th or less of that required using traditional techniques. In the future, increasing the frequency of seafloor crustal movement observations by utilizing autonomous surface vehicles may allow the processes by which the strain accumulated along marine–continental plate boundaries is released to be clarified, especially where large subduction zone earthquakes have repeatedly occurred. Such observations are expected to greatly improve the reliability of probabilistic estimates of large earthquakes and thus help to mitigate their impacts on marine infrastructure and coastal communities.
This research was partially funded by the Japan Society of the Promotion of Science (JSPS) [grant no. JP19H05596].
[Supplemental information]
- *
- Global Navigation Satellite System:
A general term for positioning systems that use artificial satellites, such as the Global Positioning System (USA), Galileo (EU), Global Navigation Satellite System (GLONASS, Russia), and Quasi-Zenith Satellite System (QZSS, Japan).
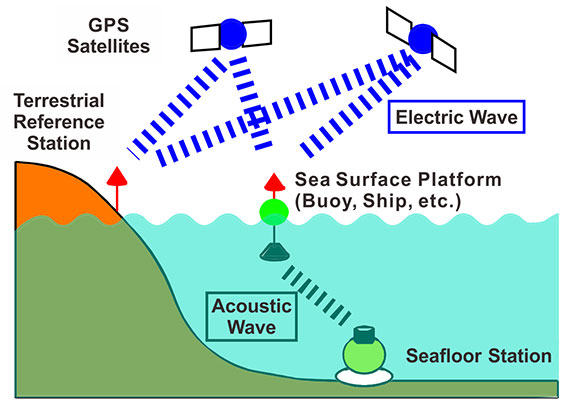
Figure 1 Schematic of GNSS-A observations. The positions of marine platforms, such as vessels and buoys, are determined by GNSS observation and the positions of submarine stations (acoustic transponders) installed on the seafloor are measured by acoustic ranging.

Figure 2 Wave Glider used for GNSS-A observations in operation at sea. This photograph was taken during test observations in July of 2019. Multiple GNSS antennae are installed on the front and rear, and an anemoscope, anemometer, and antenna used for the automatic identification system are installed in the center of the vehicle.
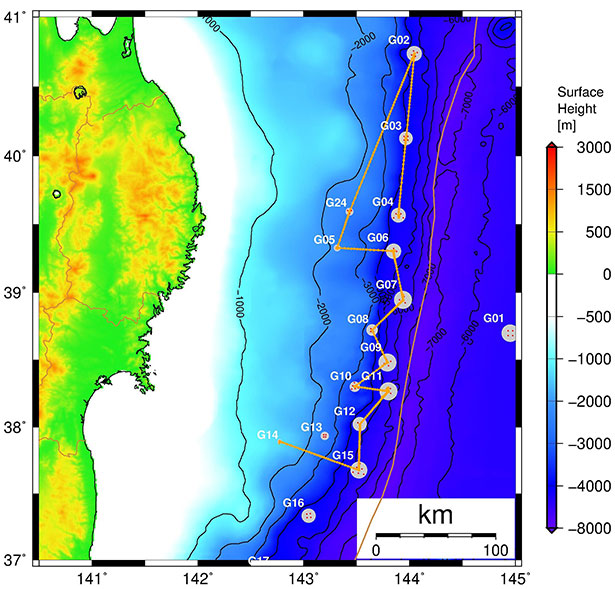
Figure 3 Wave Glider track chart. The craft was launched at station G04 and collected at station G14.
Contacts
- (For this study)
- Takeshi Iinuma, Scientist, Research Institute for Marine Geodynamics, Research and Development Center for Earthquake and Tsunami Forecasting, Earthquake Forecasting Research Group