
 フリーフォール型深海探査シャトルビークル「江戸っ子1号」実海域実験
フリーフォール型深海探査シャトルビークル「江戸っ子1号」実海域実験
---JAMSTEC「実用化展開促進プログラム」による取り組みが結実---

フリーフォール型深海探査カメラシステム 「江戸っ子1号」深海での想像図
2013年11月22日17時00分、房総沖約200㎞の海洋調査船「かいよう」の研究室の大型モニターの前に20人ほどの人たちが集まってきた。いずれも、海洋研究などには無縁な町工場の社長やその従業員、さらに銀行員やエンジニアや大学生たちなどである。
大型画面には、30分前に水深約7,800mの日本海溝の底から引き上げられたばかりのフリーフォール型深海探査カメラ「江戸っ子1号」から取り出されたメモリからのビデオが再生されていた。しばらく暗闇が続いたあと、急に画面が明るくなった瞬間、海底の細かい泥が舞い上がり餌を付けた台が下がってきた。「やった、海底だ。ちゃんと映っている」。周りの人たちから安堵のどよめきが上がった。速い流れによって泥が消えたとたんに2つの動くものが見えた。「あっ、ヨコエビだ」。この航海が始まる前に受けたレクチャーの中で出てきた深海生物の写真と同じものだった。30分もたつと餌の鯖やサンマに群がる多数のヨコエビが3Dメガネ越しにひっきりなしに画面から飛び出したり引っ込んだりしているのが見えた。およそ30分もたったころ、誰かが叫んだ「魚が泳いでいる」。そこには、画面右端にヨコエビを縫うように泳ぐ白い魚がハッキリと映っていた。その瞬間、そこにいた人達から歓声が上がった。「やった、やった、やった」。抱き合って、涙ぐんでいる人もいた。4年間にわたって続けられてきた「江戸っ子1号」開発プロジェクトが成功した瞬間だった。
「江戸っ子1号」プロジェクトの経緯

「江戸っ子1号」が撮影したビデオに生物が、成功を喜び拍手する実験参加者達
「江戸っ子1号」プロジェクトは、2009年に葛飾区の小企業「(株)杉野ゴム化学工業所」の杉野行雄社長が大阪の中小企業の人工衛星プロジェクト「まいど1号」計画に触発され、東京下町の企業を活性化したいということを目的としてスタートした。杉野社長は、未知の世界である「深海」を調査することのできる無人探査機をつくりたいということから、まず、東京東信用金庫に話を持ち込み、JAMSTECに依頼がきたのである。しかし、JAMSTECを訪問した杉野社長に対し、当時説明にあたった技術者から深海の無人探査機を一から開発するには多額の費用が必要であり、既に多くの外国製の機材が販売されている現状を説明され、すぐに開発に着手できるものではないことが判明した。そこでJAMSTECの研究者による深海探査の基礎知識の勉強会を大学の研究者やコーディネーターと一緒に進めることとし、その中で遠隔操作型探査機(ROV)の構想が浮かび上がった。しかし、ROVは技術的、資金的な面から中小企業の手に負えるものではないことが判明し、中止することも想定した。
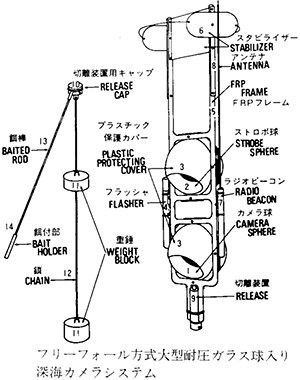
この状態を打開するために、JAMSTEC海洋工学センター海洋技術開発部の松浦正己部長から同部土屋利雄技術担当役に検討の依頼があった。土屋担当役は、JAMSTECが発足してからしばらくの間、船もなく開発資金も乏しいときに手作りしていた35年前の「フリーフォール型ガラス球深海カメラ」を思い出した。この技術を応用し、最新の電子技術を適用すれば、簡単で確実なシステムを廉価にできるのではないかと考えた。このシステムは、海面から海底まで自重で自由落下し、餌などをつけて生物を誘い出し、海底の写真を撮り再び海面に帰ってくる簡単な「往還型深海カメラシステム」である。一番の特徴は、耐圧容器に市販(アメリカあるいはドイツ製)のガラス球を用いることで最も大きな技術的な課題である耐圧容器の問題を回避し、そのほかは中小企業が持っている優れた技術力を結集することができると考えたものである。
2010年2月、「フリーフォール型ガラス球深海カメラ」の提案が行われ、プロジェクトが一挙に動きだした。この時点で、東京東信用金庫の顧客や芝浦工業大学の共同研究者の中から中小企業4社(杉野ゴム化学工業所、浜野製作所、パール技研、ツクモ電子工業)が参加を表明した。また、事務局を務める東京東信用金庫にもプロジェクトのコーディネータとして桂川氏が就任し、海洋研究開発機構(JAMSTEC)の他に芝浦工業大学、東京海洋大学が参加し、計8者が協力する形で「江戸っ子1号開発プロジェクト委員会」(以下委員会)が発足した。
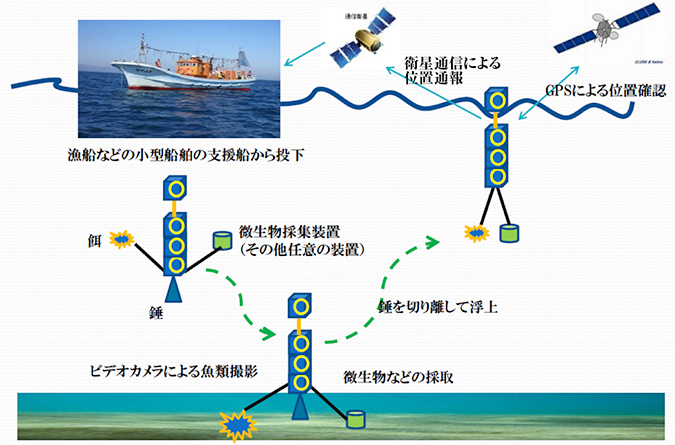
江戸っ子1号の動作概念図
錘の切り離しだけで浮上する簡単な仕組み
2011年9月には、JAMSTECの「実用化展開促進プログラム」の戦略的連携タイプに採択された。このプログラムは、企業等の課題提案を基にJAMSTECのシーズ・施設・設備・ノウハウ等を組み合わせ共同開発によって製品化・事業化を目指す内部の競争的資金制度である。プログラムに採択されたことから委員会と芝浦工業大学、東京海洋大学、東京東信用金庫、JAMSTECは契約書を締結した。この締結により、JAMSTECとして本格的に「江戸っ子1号」の開発をサポートできることになり、また、高圧実験水槽、潜水訓練プール、岸壁、調査船なども利用可能になった。
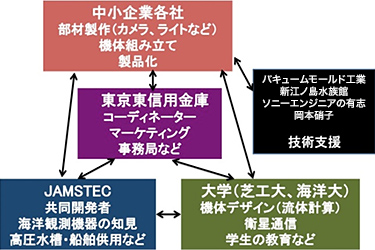
江戸っ子1号の開発体制図

江戸っ子1号」の基幹技術
深海ガラス球
また、本プロジェクト最大の懸案事項であったガラス球の国産化については、その後参加した岡本硝子により開発が行われることとなり、研究の結果、従来の外国製に負けないものが作られるようになった。またそれに付随するガラス球のカバーも輸入品ではなく、設計にマッチしたものをバキュームモールド工業が設計、製作することにより、機体の設計の自由度が大幅に向上した。これにより、当初の目標であるオール国産部品での探査機の開発の目途がたったのである。

定期的に開催された開発検討委員会
プロジェクトが動き始めてからすぐにJAMSTECの三輪哲也グループリーダー(深海生物)と小栗一将研究副主幹(深海ランダーシステム)の専門家も参加し様々な見地から検討を行ってきた。委員会は、毎月1回以上のペースで開催(通常会社が終わる夕方6時過ぎから)され、「江戸っ子1号」の開発目標を「水深8,000mの海底において3D画像の長時間撮影を行い、泥の採取などの作業を実施し、自力で海面に戻ってくる装置の開発」とした。ここで、最大水深を8,000mとしたのは、
- 市販のガラス球が安全に取り扱える水深である。
- 脊椎動物が映像で確認されている最大水深が7700mであり、それを超えたい。
- 東日本大震災での震源域が有人潜水船「しんかい6500」の潜航深度を超えているところがあり、更に大深度で詳細な調査が求められており、最深部が約8,000mである。
などの理由からである。システムの動作の概念図を示す。これは、基本的な動作として35年前のガラス球カメラと基本的には同じであるが。現在利用できる最新技術を可能な限り取り入れることとした。

江戸っ子1号の開発する基本技術
「江戸っ子1号」の概要
「江戸っ子1号」の各コンポーネントは、すべて岡本硝子社製の外径13インチ(33cm)ガラス球に封入され、船上で開封する必要のないメンテナンス・フリーのシステムを志向している。これらの機器の開発については、Blue Earth誌120号(p26-27)に詳しいのでそちらを参照されたい。各プロジェクト参加者は、常にメールなどで開発状況を確認し、JAMSTECも参加したプロジェクト会議を定期的(月1回以上)に開催し、開発作業を推進させることとした。2012年春には、機体の概要を決定し、その水中での挙動をJAMSTECの水槽や、新江ノ島水族館の相模湾大水槽で実験を行ったり、ビデオ撮影の実験を行って開発を進め、2012年10月から8回に及ぶ相模湾における漁船による実験を経て、ついに、2013年8月に実用的な試験機の完成をみたのである。
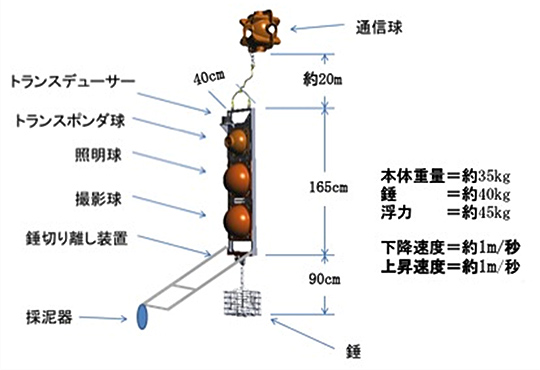
フリーフォールカメラ 「江戸っ子1号」構成図
実海域試験に向けた実験機は、図のようなものである。それぞれのユニット(ガラス球)は、岡本硝子社製の直径13インチのガラス球に封入されている。撮影球の中には、SONY社製の3次元HDハンディカムと全体を制御するコンピュータと大容量電池と非接触充電回路が入る。照明球にはLEDアレーユニットと大容量電池及び非接触充電回路が入っている。この撮影球の制御ユニットから照明球をWi-Fiの電波で制御できるようにガラス球の間に特殊なゴム(特許出願中)がおかれている。このための通信技術もこのプロジェクトで得られた成果の一つである。トランスポンダ球の中には、音響トランスポンダユニットが封入されている。これは、電波の使えない海中において距離を出すために利用され、さらに切り離し装置の錘を切り離すためのコマンド信号を受け付ける。この切り離し機構は、海中で電流を流して強制的に電蝕を起こし、重りのついた金属板を切り離す方式であり、動作は安定だが、重りが切れるまでに10分から20分程度の時間がかかる。通信球には、測位のためのGPSとイリジウム通信またはARGOS衛星通信装置が封入されており、海面に浮上すると自分の位置を衛星経由でメールを船に送ってくる、今回は、回収に万全を期すためにARGOSのビーコン信号を直接受信するための方位探知機も用意した。通信球と本体の間には20mのロープで繋がれているが、浮上した場合にこのロープにスマル(鈎)を掛けて回収を行う。採泥器は、ゴム製のジャバラの圧縮結束を電蝕線で切り離すという簡単なものであるが残念ながら今回はうまく動作しなかった。江戸っ子1号の落下速度と浮上速度は、漁船を用いた水深750mでの事前実験結果から1m/秒くらいであると推定され、水深8,000mの場合着底まで2時間程度になるであろうという予想であった。
実海域試験
この航海の正式名称は、「往還型深海探査機「江戸っ子1号」実海域実験(KY13-E05航海)」である。もともとは、2013年9月22日~9月25日に予定された「かいよう」KY13-13という航海であったが、残念ながら台風20号の影響による荒天のため、実験海域への航海途中で引き返し中止となってしまった。今回再チャレンジとして、11月21日~11月24日にかけて航海が実施された。
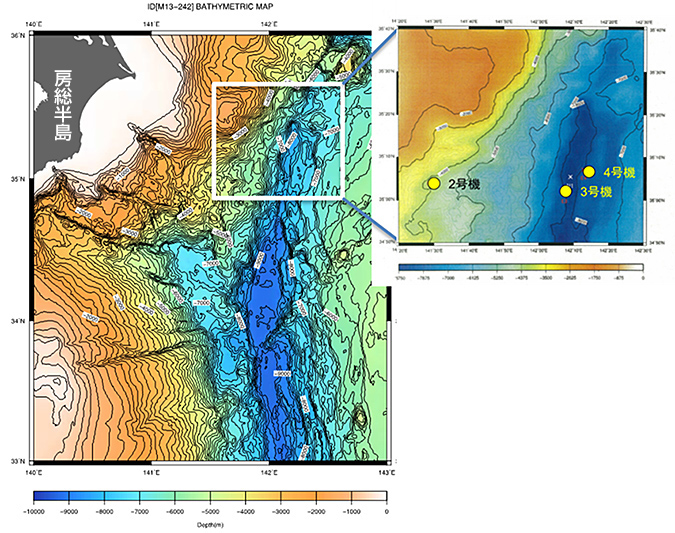
実験海域図 日本海溝南端域(伊豆小笠原海溝北端域)最大水深8,300m
試験海域は、日本海溝の南端(伊豆小笠原海溝の北端)海域の水深8,000m~7,700mである。海底に投下されたのは、写真のように「江戸っ子1号」2号機(RED)3号機(GREEN)4号機(BLUE)の3台であり、それぞれ、2号機は、約4000m、3号機4号機は約8,000mの海域に投入することになっていた。通常「江戸っ子1号」のように深度計が装備されていない場合に実際にその深度に着底したかどうかは、船装備の測位システムが利用される。しかし、今回使用した測位装置は、可搬型の簡易なものであり、スラントレンジ(斜距離)しか求めることができないため海底での正確な位置は決定できなかった。だが、8,000m海域の海面付近海流は、概ね0.3ノット(約15cm/秒)以下であり、浮上時の位置もほぼ同じ場所であることから3号機と4号機はこの深度に着底したと推定している。

無事回収され甲板上に揃った「江戸っ子1号」2号機(RED)3号機(GREEN)4号機(BLUE)
11月21日09時00分、大勢の関係者の見送りを受け、予定通り「かいよう」は、横須賀港の岸壁を離れた。今回のメディアの過熱ぶりは、凄まじかった。主な新聞やTV局各社の取材陣が出航までインタビューなどを続けており、この航海の注目の高さに驚いた。さらに、本航海では委員会が募集したメディアとしてNHKと東京MXの取材チームが同乗するという通常のJAMSTECの航海では考えられない対応であった。「かいよう」は東京湾を出て、試験海域までの約200kmを約12ノットで快調に航走し、21日18時30分ころ深度4,000m海域に到着した。その2時間ほど前から実験スタッフによって2号機の投入準備作業が開始されていたが、ここでは、町工場の方々だけではなく、学生たちも重要な役割を担って良く働いた。「江戸っ子1号」は、外部のパソコンからガラス内部の制御部に無線LANを介して設定を行うことができるため、ガラス球を開ける必要がなく、乗船前に組み立てられた状態のまま投入可能である。ここで最新の着底予想時間を基に撮影スケジュールに合わせてタイマーの設定が行われた。最後に餌となる鯖やサンマが網に入れて取り付けられ、簡単な海底生物トラップも併せて取り付けられた。すでに暗くなった19時10分に「かいよう」の乗組員たちによって海中に投入されたが、作業は迅速に行われ所要時間はわずか10分くらいであった。測深の結果、投入した海域の水深は、4,090mであった。音響測位装置で着底を確認し、直ちに「かいよう」は8,000m海域に向かって航行を開始した。

投入準備が完了した3号機

3号機 船尾から投入中作業中

2号機の整備 照明球(中央)と撮影球(右)
11月22日の真夜中に8,000m海域着。朝まで待機し、05時00分ころから3号機の投入準備が開始され、明るくなり始めた06時30分ころから微速で目標海域に向かい、07時00分海域着、3号機が投入された。計測された投下地点の水深は、7,860mであった。投入後、測位を開始し、1分おきにトランスポンダによってスラントレンジを測定し、落下速度を計算した。その結果、予想速度(1m/秒)よりもわずかに早い1.1m/秒であり、着底まで2時間程度を要すると予測された。着底を待たずに、4号機の投入予定地点へ向かったが、点検中に撮影球位置が少し動いていることがわかりカメラの位置を修正することとなった。結果的には、これが功を奏し、4号機のカメラは画面中央に餌台を捉えることとなる。予定より30分遅れで09時30分に4号機を投入したが、海域の水深は、7,822mであった。
その後、3号機の回収作業のため投入地点に戻り、13:00頃に切り離しコマンドを送信した。15時00分頃、浮上によって通信球中のARGOS衛星送信機が作動し、方位探知器により方向が確認され、海面を監視していた乗組員によって1マイルほどのところを漂っている3号機が発見された。そのときスタッフ達は、初めて深海から海面に戻った「江戸っ子1号」を発見でき、安堵の気持ちで一杯だった。

浮上した3号機 先取りブイのロープが絡んでいた

船上に回収された3号機

LEDライトが点灯した状態
甲板上に戻された3号機の撮影球が直ちに開封され記録メモリからビデオデータがダウンロードされた。録画された3Dビデオデータ(3D動画のMTSファイル)の合計時間は、4時間41分であった。コンピュータのログの解析から、動作プログラムなどは、予定どおり実行されていたことがわかった。このビデオには、着底から浮上までのすべての過程が3次元フルハイビジョン画像として鮮明に記録され、ライティングのむらもほとんどなくフォーカスも画面中央付近に良く合っていた。
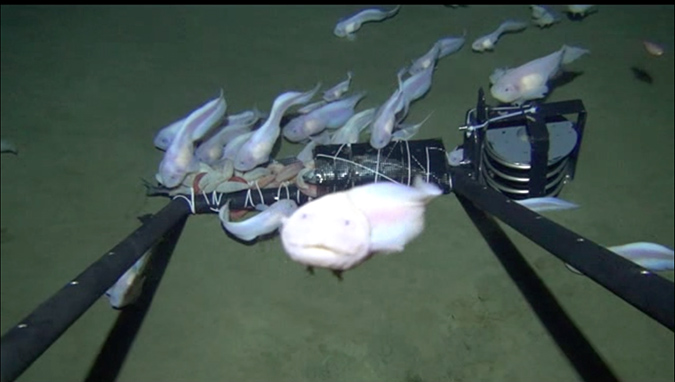
映像は、着底の瞬間、泥が舞い上がって視界が悪くなったが、思いのほか速い流れによって数十秒で画面はクリアになった。着底後約20分でヨコエビと思われる生物が集まり始め、30分くらいで餌とした鯖やサンマが見えないほどの数が集まってきた。餌台に取り付けられた採取トラップには30匹ほどのヨコエビが捕獲されており、最大個体長は、5.3㎝であった。また、餌とした魚は、骨以外すべて食べられてまるで魚骨標本のようになっていた。着底から35分後には、画面右から魚が泳いできてヨコエビを食べているような様子が確認できた。この魚の形から「シンカイクサウオ」の一種だと考えられたが、詳細は解析中である。3D画像としてみると魚の体の構造や遊泳の様子が従来よりも詳細に見ることができた。これらの魚は、浮上開始まで見えており多いときには20匹以上が潮の流れに向かって泳ぎ、餌を漁っている様子が鮮明に映し出されていた。また、船上に回収後の画像も鮮明に記録されていた。なお、このように7,800m付近という深海において魚(脊椎動物)が3D映像で撮られたのは、おそらく世界初であると考えられる。
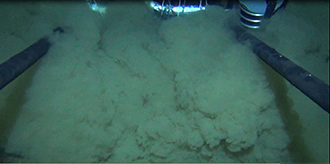
3号機のビデオ 着底直後 舞い上がる泥。
餌のサンマが見える(7,860m)
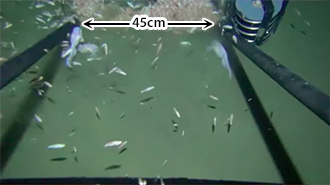
3号機のビデオ 着底後約1時間
ヨコエビの大群とシンカイクサウオの一種(7,860m)

採集されたヨコエビ(体長5.3㎝)
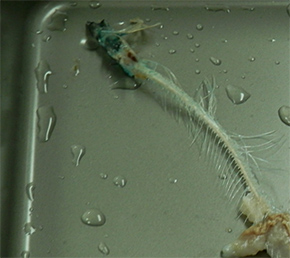
餌はきれいに食べられて骨だけに…
11月23日早朝、4号機の回収作業を開始した。04時00分に切り離しコマンドを送り、07時00分頃船上に回収し、直ちに4,000m海域に向かって航走を開始した。この4号機からダウンロードされたビデオにはプログラムどおり、間欠的に17時間にわたって映像が記録されていた、ビデオデータから着底時間は、11時29分であることが判明し、3号機と同様に着底10分後にはヨコエビが集まり始めた。しかし、ここでは、ヨコエビの数はさほど多くならず12時00分ころにはシンカイクサウオの一種と思われる魚が集まり始めた。回収前の19時00分頃には25匹を数えることができた。
11時30分 4,000m海域着。2号機に切り離しコマンドを送り、12時45分頃、船の後方約300mに浮上を確認、船上に回収し、機体整備後、14時00分作業はすべて終了。予定時間どおりに横須賀新港に向けて航走を開始した。
2号機は、プログラムどおりに間欠的に約40時間の撮影が行われていた。映像から、着底して10分後には1m以上もあるソコダラ類が多数集まってきて30分ほどで餌がすべて食べられる様子が見られた。その後も何度か1.5m以上もあるソコボウズの仲間が出現していたが画像を3Dで見ると体の大きさや傷の形や鰭などの細かい動きを詳細に見て取ることができた。
4号機のビデオ 着底後約2時間 餌を漁るシンカイクサウオの一種とヨコエビ(7,822m)
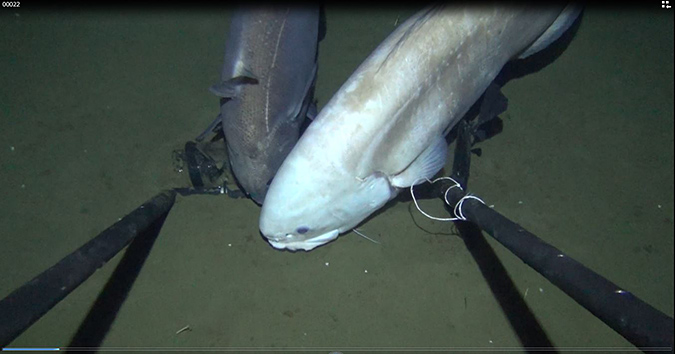
2号機のビデオ 着底後約1時間後 大きなソコダラ類(左)ソコボウズの仲間(右)が見られた。
体長は1m以上と推定(水深4,090m)
明けて11月24日09時00分横須賀新港に到着。岸壁にはマスコミ各社の取材陣が殺到しており、到着してから2時間ほどもインタビュー等の対応に追われることとなった。今回は、サイエンスではなく産学官金連携による町工場の活躍という社会的・経済的な切り口としてメディアの関心が非常に高かったものと思われる。

全機回収後、成功を祝して実験参加者全員で記念撮影
この実海域実験は、JAMSTECの「実用化展開促進プログラム」という枠組みで実施されたものであったため、実験に参加したスタッフのほとんどは、海洋とは縁がない業界や大学からの参加である。彼らは、海洋技術という新しい世界に自ら進んで飛び込んできた人たちであり、従来からの海洋産業?の裾野を広げることができたということでも海域試験の成功と同じくらいの大きな意義があったと思う。JAMSTECの立場からいうと、高い技術力を持つ中小企業に高度な深海機器の製作を依頼できる可能性ができたこと、特に海洋観測に多数使用される高性能なガラス球の国産化ができたことも大きな成果であった。
今後、この「江戸っ子1号」の試作品を商品化に向けての改良と低価格化の努力が続けられる予定である。商品化が実現し商業ベースにのせることができれば、本プロジェクトの最終的な目標が達成できると期待している。また、芝浦工業大学のように従来から海洋工学関係の研究に全く携わってこなかった大学においても研究者や学生たちの興味を向けさせたことも特筆すべき事である。
最後になるが、4日間という短い航海で多くのミッションをこなし、その卓越した技術で海域実験を成功に導いていただいた海洋調査船「かいよう」の請蔵船長以下乗組員の皆様に心から深謝する。
往還型探査機「江戸っ子1号」性能確認試験(かいようKY13-E05航海)乗船者
(敬称略 順不同)
- 海洋研究開発機構
- 土屋利雄(首席研究員)、松浦正己、柴田桂
- 浜野製作所
- 浜野慶一、山本佳代
- パール技研
- 小嶋大介、柿沼浩信
- 岡本硝子
- 高橋弘、上野有穂
- 東京東信用金庫
- 桂川正巳、中川正勝
- 芝浦工業大学
- 岩田健一、肥澤拓也、佐藤優太、岡本優志、磯野颯一
- 東京海洋大学
- 高橋あずみ、速水暁弘
- ソニーエンジニアの有志
- 河上達
- 新江ノ島水族館
- 杉村誠
- アイツーアイ技研
- 糸井成夫
- 日本海洋事業 観測技術員
- 前川拓也
海洋工学センター 土屋 利雄