Successful real-time Transmission of Sonar Images via High-speed Acoustic Communication from the 8,000m class AUV “Urashima 8000”
It is now possible to make flexible modification of the observation scenario based on acquired data during the dive.
1. Points
- “Urashima 8000” (Figure 1), a cruising AUV capable of diving up to depth of 8,000 meters, has been equipped with a system that transmits sonar data of the seafloor to the support vessel on the surface in real time via underwater acoustic communication.
- In November 2025, test dives were conducted in an area of approximately 7,000 to 7,500 meters depth, during which side-scan sonar images were transmitted to the support vessel using the High-speed acoustic communication system. Upon observing the images on board, the team was able to identify several-meter-scale seabed structures and distinctive seabed topography.
- Conventionally, large-size data, such as sonar images, could not be observed until the AUV had been recovered on the ship. However, with this system, it is now possible to change the mission plan during a dive based on the observed results on board. This is expected to significantly improve survey efficiency.
Figure 1: “Urashima 8000”
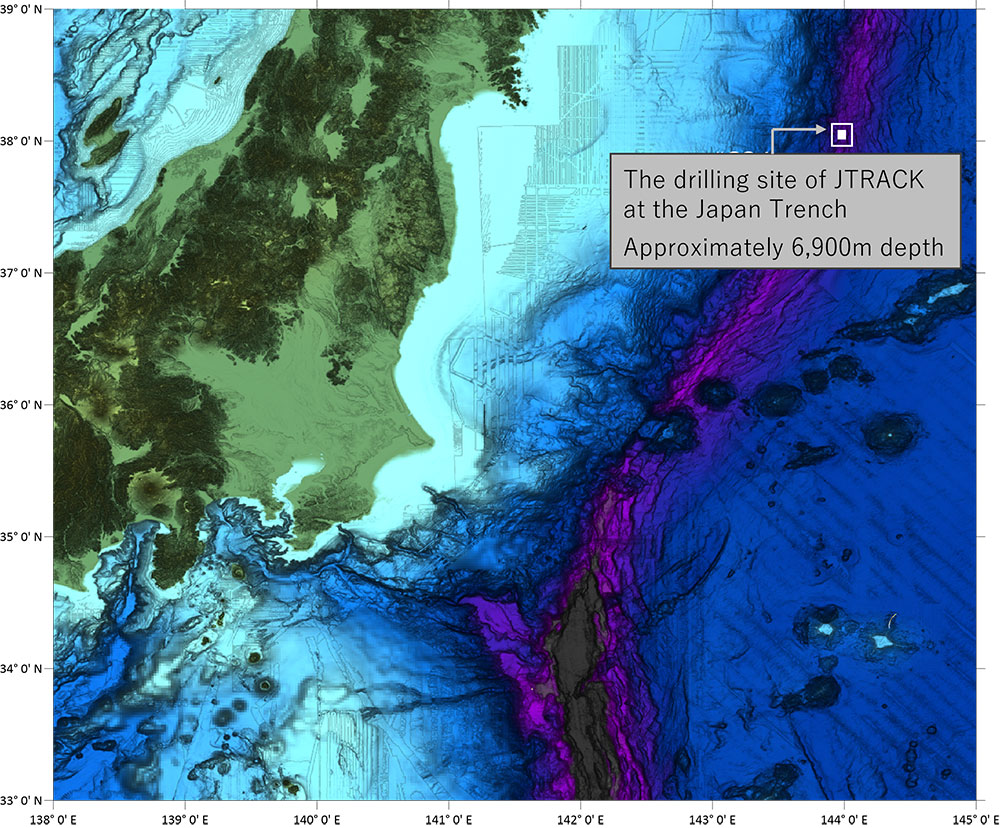
Figure 2: Diving Area from November 15 to 16
2. Background
In order to enable detailed surveys of the hadal zone, JAMSTEC has been modifying the cruising AUV “Urashima,” previously whose depth rating was 3,500 meters, to enable it to dive to depth of 8,000 meters.
To draw detailed seafloor topographic maps over a wide area, it is necessary to ensure as long observation period as possible near the seafloor. Furthermore, when observing the hadal zone, descent and ascent take considerable time.
On the other hand, while conventional acoustic communication systems could transmit the data of the AUV’s status—such as its position, battery level, speed, and attitude—they were unable to transmit observational data such as sonar images, which require large transmission capacity.
Therefore, the observation data could not be obtained until the AUV was recovered, which meant that even if important data had been acquired during the dive, check by researchers was delayed. In order to obtain additional data, the AUV had to be launched again in the same area within the limited survey schedule.
Furthermore, if adverse weather conditions make us not be able to conduct additional survey immediately, we may have to close the research cruise without sufficient data to produce remarkable research results.
As such, the inability to view the data acquired by the AUVs in real time was one of the major issues in observation with the AUVs.
3. Result
The “Urashima 8000” is equipped with a high-speed data transmission system based on the integrated underwater acoustic communication and positioning system*1 developed by JAMSTEC.
During a test cruise conducted from November 6 to November 26, 2025 (in waters of the Japan Trench at a depth of approximately 7,000 meters), we successfully transmitted side-scan sonar images in real time using acoustic communication.
In this transmission, we transmitted downsampled data from the side-scan sonar at a maximum rate of approximately 58 kbps (the user data transmission rate, considering intervals).
In particular, during the dives conducted near the drilling sites of the JFAST*2 and JTRACK*3, which are research cruises by the deep-sea drilling vessel “Chikyu”, from November 15 to 16, we were able to observe some distinct acoustic reflections almost in real time on board.(Figure 3).
After the cruise, detailed data analysis revealed that the distinct acoustic reflections observed by the “Urashima 8000” are similar to those from metal objects previously observed with a side-scan sonar, and that their relative positions match those of multiple drilling sites and borehole and wellhead locations of the JTRACK and JFAST projects.
Therefore, we concluded that these distinct acoustic reflections are from the borehole and wellhead placed in JTRACK and JFAST projects (Figure 4).
In other words, even with sonar images downsampled and transmitted in real time, the resolution was sufficient to distinguish metal structures whose heights are 2 to 5 meters above the seabed, as well as topography on the seabed with diameters of approximately 2 meters. This confirmed that the resolution of the transmitted sonar images is adequate for observing seabed features.
Integrated underwater acoustic communication and positioning system
A high data-rate communication modem was developed independently by JAMSTEC in 2018 and equipped on the submersible “Shinkai 6500.”
This modem achieves a transmission rate of approximately 80 kbps at a depth of 6,500 meters, based on the effective data rate (the transmission speed of data excluding known data such as training sequence relative to the total signal length).
Furthermore, in 2020, JAMSTEC developed a modem that integrates positioning capabilities to enable high-rate and reliable communication and positioning.
References: https://www.jamstec.go.jp/engd/e/uatrg.html
JFAST
Integrated Ocean Drilling Program [IODP] Expedition 343 Japan Trench Fast Drilling Project.
JTRACK
International Ocean Discovery Program [IODP] Expedition 405 Tracking Tsunamigenic Slip Across the Japan Trench.

Figure 3: Distinct acoustic reflections observed in real time on board (inside the white circles)
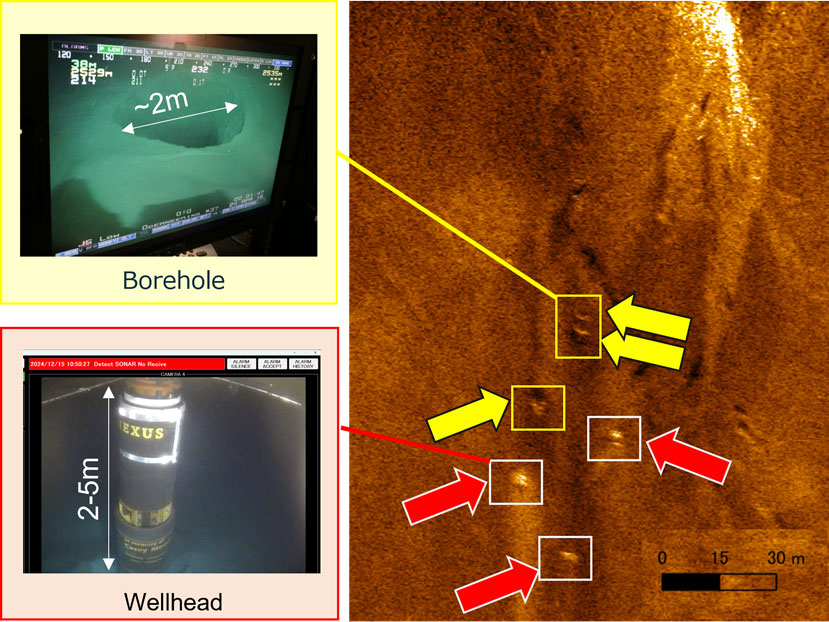
Figure 4: Processed side-scan sonar image and the identified borehole and wellhead
4. Future Outlook
Surrounding Japan, there are deep-sea trenches—such as the Japan Trench, the Izu-Ogasawara Trench, and the Nankai Trough—along the Japan Archipelago. These areas hold the potential to inspire research into megathrust earthquakes and tsunamis, as well as the discovery of new species, thereby contributing to the resolution of societal challenges and stimulating human curiosity.
By equipping AUVs with the integrated underwater acoustic communication and positioning system, and utilizing this system for real-time transmission of the observation data, researchers checking the observation results can promptly issue instructions from the ship to alter survey routes for additional investigations, deploy other research vehicles based on the findings, and proceed to the next phase of the survey, such as sample return.
Furthermore, the use of AUVs for marine surveys and observations is becoming increasingly widespread as a means of mitigating human risk and supporting the expansion of marine industries, including offshore wind power generation.
The function to view observation data in real time will also contribute further expand the use of AUVs in these initiatives.
More Information
Underwater Acoustic Technology Research Group
https://www.jamstec.go.jp/engd/e/uatrg.html
Urashima 8000
https://www.jamstec.go.jp/mare3/e/ships/deep_sea/urashima.html
Contacts
(For this study)
Yoshitaka Watanabe, Senior Researcher, Research Institute for MarineTechnology and Engineering, Marine Engineering Science Center, Underwater Acoustic Technology
Research Group, JAMSTEC
(For press release)
Press Office, Marine Science and Technology Strategy Department, JAMSTEC