このプレスリリースには、ジュニア向け解説ページがあります。
2010年 8月 18日
独立行政法人海洋研究開発機構
先端技術を結集した作業型自律探査機の海域試験に成功
〜 世界最新の制御システム、航法装置、動力源の実用化へ 〜
1.概要
独立行政法人海洋研究開発機構(理事長 加藤 康宏、以下「JAMSTEC」という。)は、国家基幹技術・次世代型深海探査技術の開発の一環として研究開発を進めてきた深海用リチウムイオン電池、小型慣性航法装置、分散制御CPUシステム、高機能画像システムを作業型自律探査機「Marine Robot Experimental-1 (MR-X1)」(※1、図1)に搭載して海域試験を実施し、当該各機器を適用した潜航、及び模擬作業に成功しました。
いずれのシステムも従来と比較して小型・高性能化されており、これにより機体サイズに対してより多くの搭載スペースが確保されるだけでなく、機能性、信頼性が大幅に向上されています。新しく開発した深海用リチウムイオン電池は従来品の約1.7倍以上のエネルギー密度が得られ、また小型慣性航法装置は、従来品の約半分のサイズに抑えることで、国内最小、最軽量の高精度慣性航法装置となっており、様々なパラメータを外部から設定する機能も備えています。分散制御CPUシステムは多数のCPUを機能に応じて分散して使用することで各CPUの負荷を低減させ、システム全体の信頼性を格段に向上させています。更に、3次元ステレオ視計測が可能な高機能画像システムを搭載し、海中映像さえあれば3次元位置や2点間の長さ、面積といった幾何学的な計測が可能となりました。
2.主な新技術の特徴
1)深海用リチウムイオン電池
ラミネート式の薄板型Ni系リチウムイオン電池を用いることで、従来の深海用リチウムイオン電池よりも約1.7倍以上の容量を得ることが実現されました。電池自体を油漬けさせる均圧方式を採用しており、重厚な格納容器を必要としない小型軽量の深海用リチウムイオン電池となっています。また、各セルの残電圧を自動的に均一させる電子回路が組み込まれており、世界で初めて大水圧環境下にて長時間安定した電力を供給することが可能な動力源となっています。
2)小型慣性航法装置
慣性航法装置は、移動体の加速度と角速度を計測して演算処理することにより、姿勢や絶対位置を求めることができる装置です。今回開発したものは、国産宇宙ロケットにも採用されている超小型のリングレーザージャイロを組み込んだ国内最小(従来品の約2分1)、最軽量の高精度な慣性航法装置となります。また、内部演算時や複合航法時、初期静定時にて用いられる各パラメータを適宜、カスタマイズする機能も世界で初めて持たせました。現在、同装置で得られた知見を基に、世界最高精度となる小型慣性航法装置の研究開発も進められています。
3)分散制御CPUシステム
新しい制御CPUシステムでは、多数のCPUを機能に応じて分散して使用することで、各CPUへの負荷を軽減させ、同時にシステムの変更にも柔軟に対応できるようにしました。各CPUは専用の通信バス(通信経路)で連結されており、様々な情報や指令をシステム全体で管理できる仕組みが組み込まれています。これにより、あるCPUに不具合が発生しても、自動でその不具合を補償することが可能なシステムになっています。
4)高機能画像システム
本研究開発では、ステレオ配置した2台のデジタルカメラを用いた3次元ステレオ視計測により、3次元位置や2点間長、面積といった幾何学的な情報を計測するシステムを実現させました。このシステムでは、海水や水圧に起因する光学特性変化を補償する仕組みをMR-X1に組み込み、海中の映像を撮影するだけで任意の幾何学情報が算出されます。このシステムを応用すれば、深海生物や鉱物の採寸、海底断層の計測や海中機器の不具合判断などが、映像のみにより実現されます。
3.試験結果
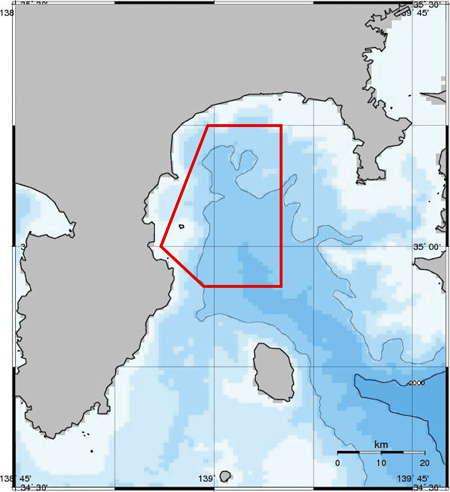
海域試験は平成22年8月4日から8月13日にかけての相模湾水深80〜1500mの海域にて実施しました(図2)。
海域試験では研究開発を進めてきた深海用リチウムイオン電池、小型慣性航法装置、分散制御CPUシステム、高機能画像システムを「MR-X1」に全て搭載し、実海域で正確に機能することを確認しました。またその「MR-X1」にマーカーフラグを把持させ、自律航行、自律潜航の後に自律して海底に着底し、任意の場所にマーカーフラグを設置する試験を実施し、世界で初めて全自律動作による海底設置作業(※2)に成功しました。更に同海域試験では、この自律作業機能を一部適用することにより三成分磁力計を海底設置することにも成功しました。この機能を向上させていくことにより、ある規模の機器やセンサの海底設置・回収ならば、深海探査機が全自動で行うことが出来るようになります。また、これら各試験中において、人為的に特定のCPUに不具合を発生させ、分散制御CPUシステムがその不具合を自動補償することを確認しました。
4. 今後の予定と展望
国家基幹技術で開発した、深海用リチウムイオン電池、小型慣性航法装置、分散制御CPU システム、高機能画像システムの各技術を、様々なタイプの深海探査機に適用することで、探査機自体の機能向上はもとより、探査機の小型化、長時間運用、信頼性向上、運用コスト削減が期待されます。また、資源探査や環境調査を担う次世代の自律探査機開発に応用していくことで、資源・エネルギー開発や、海中に溶存する地球温室効果ガスの精密調査に大きく貢献することも期待されます。
「MR-X1」は引き続き、研究開発した先端的な海洋技術の現場実証のプラットフォームとして、更なる機能向上を目指すとともに、これにより得られた知見を次世代の深海探査機開発にフィードバックし、世界を先導する海洋技術の更なる高度化を目指していきます。
※1 「MR-X1」
小型の自律探査機(Autonomous underwater vehicle:AUV)で、自らのプログラムに従って行動できる作業型AUVです。AUVとしての運用だけでなく、細径光ファイバーを用いた遠隔操縦での運用も可能な探査機となります。重さは約 800 kg、長さ2.5mで、設計潜航深度は約4000 mです。観測装置として、ハイビジョンTVカメラ、NTSCカメラ3台、サイドスキャンソナー、CTDを標準搭載しています。
※2 海底設置作業
「MR-X1」のハンド部にマーカーフラグを把持させ(図3)、自律して目的の位置まで水平航行します。目的地直上までくるとモードを切り替えホバリングを行い、次に海底高度を計測しながら速度を制御しつつ自律して下降を始めます。海底のごく近傍になるとまたモードを切り替え、惰性力を考慮しつつで海底に接近し着底し、着底を確認すると状態を維持するようにスラスタ速度を制御します。この状態でマーカーフラグを切離し海底設置し、設置後に浮上します。
本海域試験では、着底後の切離しから浮上の過程以外、上記自律作業機能を適用することにより、三成分磁力計を海底設置することにも成功しました。


お問い合わせ先:
- 独立行政法人海洋研究開発機構
(本研究について) - 海洋工学センター 先端技術研究プログラム
技術研究主任 石橋 正二郎 TEL:046-867-9389
- (報道担当)
- 経営企画室 報道室長 中村 亘 TEL:046-867-9193