
Team KUROSHIOは無人の洋上中継器(ASV)と複数の自律型海中ロボット(AUV)の連携・同時運用という、世界でも前例のない調査システムを構築し、超広域・超高速の海底マッピングに挑みます。
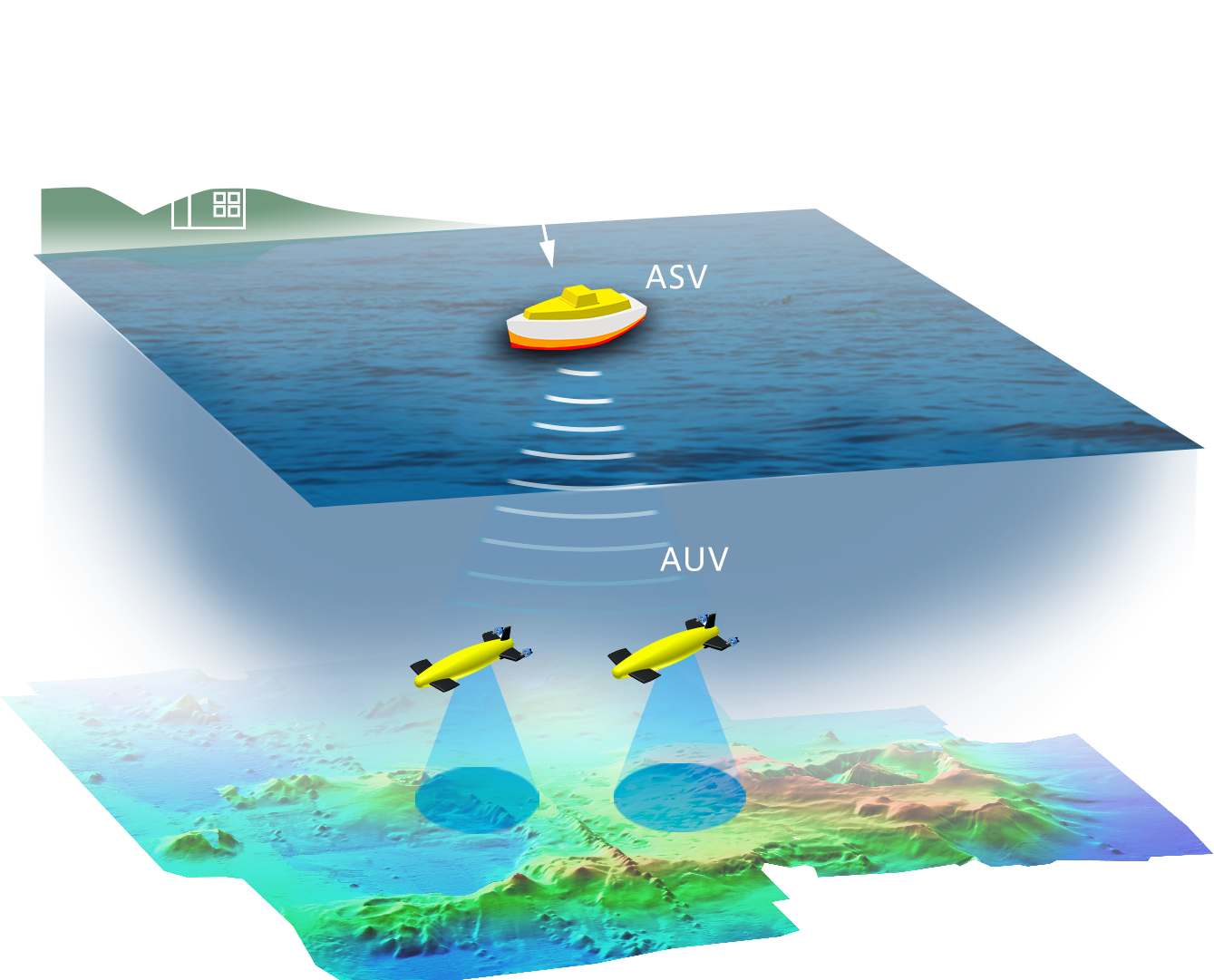
洋上中継器(ASV)
海中のAUVの位置情報・速度等を海上で計測し、得られた計測データを衛星通信等により陸上に送信する無人の船舶型ロボット。衛星通信による遠隔操作が可能。

洋上中継器(三井E&S造船)
全長:5.3m、胴体幅:2.2m、胴体高さ:0.9m、重量:1800kg、速力:20kt(最大)
自律型海中ロボット(AUV)
設定したルートに従って自律的に海中を調査するロボット。海中では電波がほとんど伝わらないため、水中音響により通信・測位等を行う。船舶よりも海底に接近できるため、高解像度のデータを取得できる。

全長:5.6m、胴体幅:1.8m、胴体高さ:1.7m、重量:2,300kg、速力:4.5kt
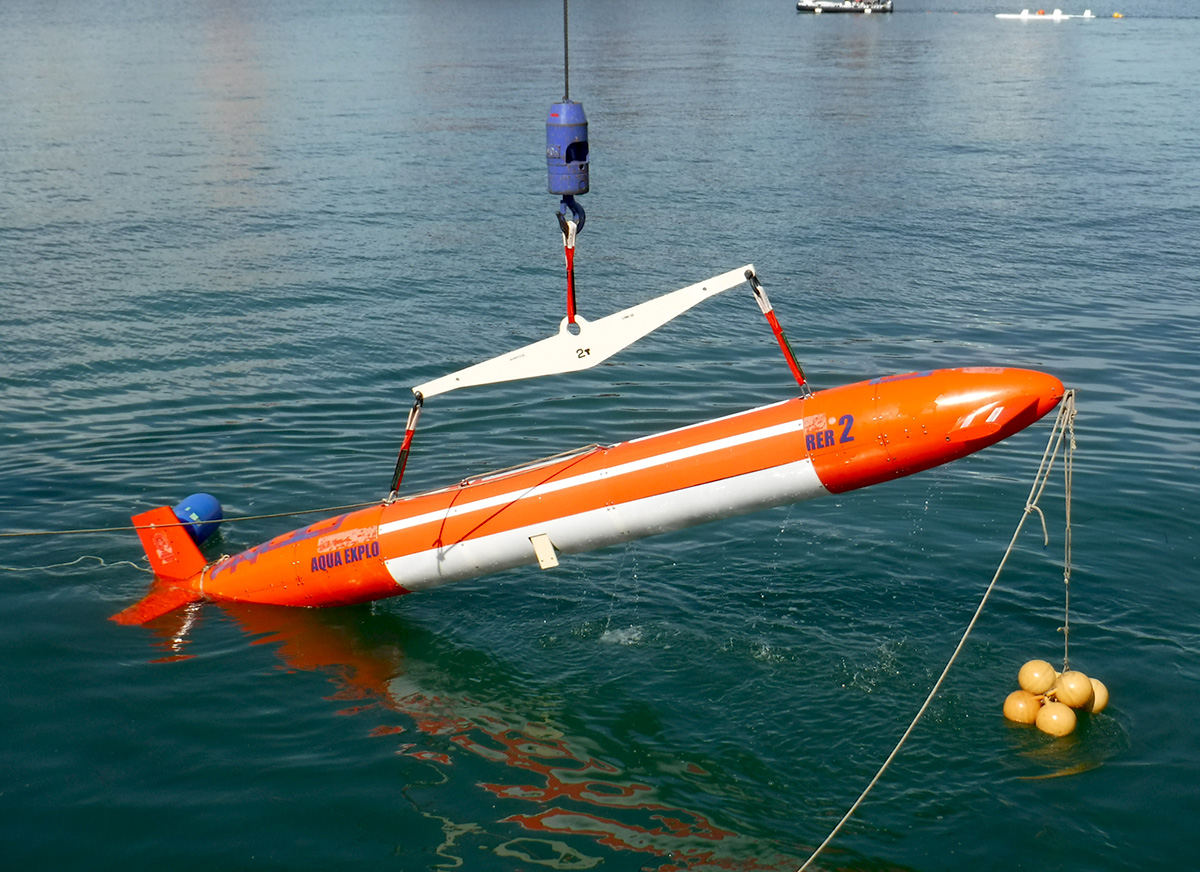
全長:5.5m、胴体幅:1.4m、胴体高さ:0.9m、重量:550kg、速力:調整中