プレスリリース
2015年 12月 2日
国立研究開発法人海洋研究開発機構
AUV搭載式3Dレーザースキャナーによる海底熱水域の可視化に成功
―「海のジパング計画」による技術開発が新たな資源調査手法を確立―
1.概要
国立研究開発法人海洋研究開発機構(理事長 平 朝彦、以下「JAMSTEC」という。)海洋工学センター海洋技術開発部の石橋正二郎主任技術研究員らの研究グループは、内閣府が進める戦略的イノベーション創造プログラム(SIP:※1)の課題の一つである「次世代海洋資源調査技術(海のジパング計画)」において開発を進めている、自律型無人探査機(AUV)搭載式3Dレーザースキャナーを用いて、伊豆大島南方約20kmの大室ダシ・大室海穴内部にある海底熱水噴出域の3D可視化に成功しました。
大室海穴では、3Dレーザースキャナーを搭載したAUV「おとひめ」が大室海穴内部を高度保持しながら自律航行することにより、数十センチ規模のチムニー(熱水の成分が沈殿して形成される煙突状の構造物)や熱水が噴出している様子が鮮明に可視化されました。またこの可視化技術により、数cm単位の幾何学情報(長さ・面積・体積)の取得にも成功し、従来の音響観測技術やカメラ技術では可視化が困難だった対象や事象を単に「捉える」だけでなく「測る」ことまでもが実現されました。
AUVを適用した海中レーザースキャニングによる海底熱水噴出域の3D可視化及び計測は世界初の快挙であると同時に、従来の海中観測技術に拠らない新たな観測技術を確立する極めて画期的な成果です。今後、「海のジパング計画」における海洋資源調査を始め、海中におけるより高精度かつ効率的な観測の実現に寄与することが期待されます。
なお、本成果は、12月2日に大崎ブライトコアホールにて行われる「戦略的イノベーション創造プログラム(SIP)次世代海洋資源調査技術(海のジパング計画)第2回シンポジウム~これからの海洋資源調査はこう変わる!~」でも紹介される予定です。
2.背景
光の届かない深海で探査機を使用して海底地形等を調査するには、海中での減衰が少ない音波を用いた音響観測技術(※2)を使用することが一般的です。音響観測技術は遠距離から広範囲を効率よく観測できる利点がありますが、反面、海底からの距離が遠いため一般的に高精度な観測には不向きであり、生物や地形等の詳細な情報を得るには近距離からのカメラ観測技術に頼る必要があります。しかしながら熱水噴出域のように凹凸のある海底では、海底に接近し過ぎると探査機の航行自体に危険が伴うという問題があります。
そこで、JAMSTECでは、音響観測とカメラ観測の両者の短所を補完し、比較的広い範囲を中距離から高精度に観測できる第3の観測技術として、レーザー光を用いた海中レーザースキャニングについて取り組んできました(2011年7月4日既報:図1)。2013年にはAUV「おとひめ」に3Dレーザースキャナーの一次試作機を搭載し、手石海丘周辺域(相模湾)において約150mに及ぶ海底面3Dデータの取得にも成功しました(2013年2月8日既報)。
一方、平成26年度より5カ年計画でスタートした「海のジパング計画」では、その取り組みの一環として、海底ケーブルを用いた観測プラットフォームの開発が進められています。これは、伊豆大島南方沖の大室ダシの西側に位置する大室海穴およびその周辺にケーブル式観測システムを展開するとともに、海底ケーブルに充電ステーションを連結させ、ここを拠点にAUVを発着させることで長期観測を実現する計画です。AUVは海底充電ステーションで充電を繰り返しながら、生物の生息密度や生物個体の識別等の観測、海底地形の詳細な調査を行います(「探査機複合観測システム」:図2)。
この充電ステーションを利用したAUVによる観測に、これまで開発を進めてきた3Dレーザースキャナーを搭載することで、AUVが安全に航行できる十分な高度からの詳細な海底地形のスキャニングを実現するため、研究グループでは、従来の3Dレーザースキャナー試作機の仕様・性能を大幅に向上させた新たなAUV搭載式3Dレーザースキャナーの開発に取り組んできました。
3.成果
今回開発したAUV搭載式3Dレーザースキャナーは、一次試作機で得られた知見を踏まえ、仕様・性能を大幅に向上させた技術検証機となります。寸法・重量を大きく削減しつつも、スキャニング解像度および検出感度は一次試作機の数倍にまで向上しています。また、AUVが出力する各航行情報(姿勢・速度など)をリアルタイムにシステムに取り込むことにより、AUVの姿勢による僅かな位置情報の変化を正確に反映してスキャニングすることができます。また、システム内部は放熱管理を考慮した各機器配置とし、海底からの反射光を正確に受光できるように、それ以外の散乱光を遮断する構造となっています。
本検証機には、以前より当該技術の研究を共同で進めてきた三菱電機特機システム株式会社の高い技術力と、JAMSTECが長年培ってきた探査機技術および海中光学技術の知見が組み込まれています。これにより国産技術において、世界でも類の無い高感度で高性能なAUV搭載式3Dレーザースキャナーが開発されました。(表1)
2015年10月31日、3Dレーザースキャナーを「おとひめ」に搭載し(図3)、伊豆大島南方約20kmの大室ダシにおいて海域試験を実施しました。「おとひめ」は大室海穴付近まで深度制御にて自航していき、海穴内部に潜入すると、高度制御により海底から15mの距離を保持して目的の測線上を逸脱することなく航行しました(図4)。大室海穴は全長約800m、幅100m~300m、深さ100m程度の小さな海穴ですが、小規模な熱水噴出域やマウンドが複数点在する特徴的な海底を形成しており(図5)、この海域においてAUVを適用した光学観測(海中レーザースキャニング)は初の試みです。強い流れ場のある狭域において海底地形を詳細調査するためには、AUVに高い自航性能が求められますが、本ミッション遂行中、「おとひめ」は姿勢を静定させながら終始安定して自律航行しため、海中レーザースキャニングを非常に良好な状態で実施されました。
その結果、大室海穴内部の多くの特異点を海中レーザースキャニングにより3D可視化することに成功しました(図6)。特にごく小規模のチムニーやマウンド(高まり)などが、従来の音響観測技術では表現できない精度で可視化されており(図7、図8、図9)、また熱水噴出域では、通常のカメラ観測技術では撮影が困難な熱水噴出状態までもが複数、鮮明に可視化されました。さらに、これらすべての3D可視化画像は三次元位置情報(x,y,z位置)を保有する点群により構成されているため、長さ・面積・体積など、任意の幾何学情報を取得することが可能であり、チムニーの全高や頂部面積、熱水噴出の噴出高に至るまで、数cm単位での正確な計測に成功しました(図10、図11、図12)。以上のとおり、本ミッションでは1測線で全長600m、幅50mにおよぶ広範囲の海底地形が可視化され、AUVを適用する中距離からの新たな観測技術の実用性が示されました。
4.今後の展開
今回開発されたAUV搭載式3Dレーザースキャナーは、今後の海洋資源調査に大きく貢献する画期的な観測技術です。本技術をこれまでJAMSTECが培ってきた探査機技術と融合させることにより、対象や事象を単に「捉える」のみであった従来の音響観測技術やカメラ観測技術による可視化から一歩進んで、「測る」ことまでも同時に実現します。「海のジパング計画」では海洋資源調査の低コスト化・高効率化をめざしており、本技術の普及によって調査効率の飛躍的な加速に繋がることが期待されます。
研究グループでは今後、更なる高感度化、高解像度化に取り組むと同時に、海中光学の理解をより深めていくことにより、この新技術の汎用性、環境適応性を進捗させ、海洋資源調査のみならず多種多様な海中研究分野に広く利用されることをめざします。
※1 戦略的イノベーション創造プログラム(SIP)
総合科学技術・イノベーション会議(CSTI)が自らの司令塔機能を発揮して、府省の枠や旧来の分野の枠を超えたマネジメントに主導的な役割を果たすことを通じて、科学技術イノベーションを実現するために平成26年度より5カ年の計画で新たに創設したプログラム。CSTIにより選定された11課題のうち、「次世代海洋資源調査技術(海のジパング計画)」(プログラムディレクター 浦辺 徹郎、東京大学名誉教授、国際資源開発研修センター顧問)ではJAMSTECが実施機関を務めており、海洋資源の成因に関する科学的研究、海洋資源調査技術の開発、生態系の実態調査と長期監視技術の開発を実施し、民間企業へ技術移転する計画となっている。
※2 音響観測技術
音響ビームを海底に向け送信し、海底からの反射波から海底地形等を計測する観測手法。
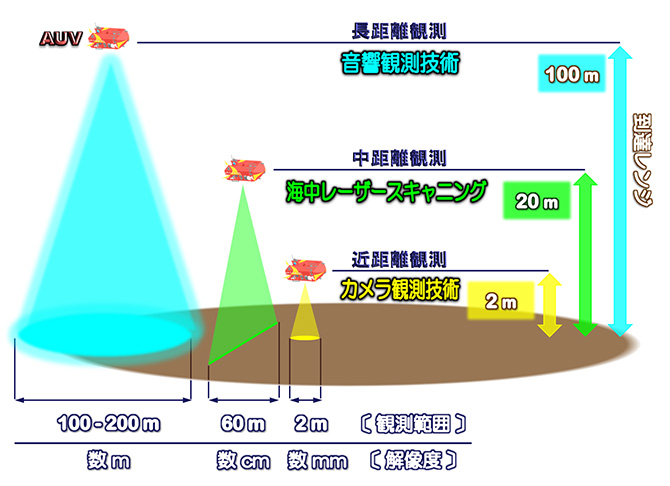
図1 海底観測手法
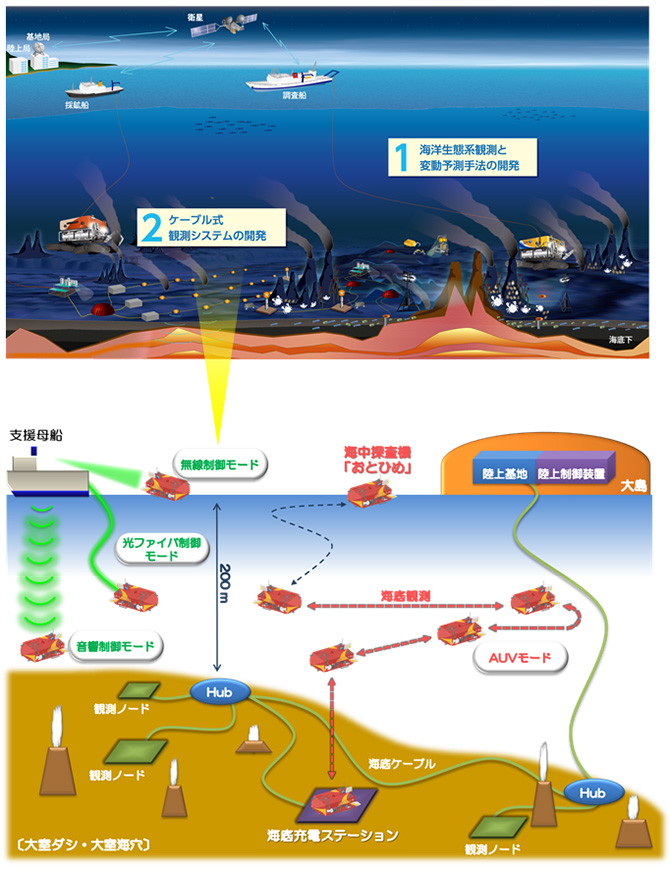
図2 上段:ケーブル式観測システム、下段:探査機複合観測システム
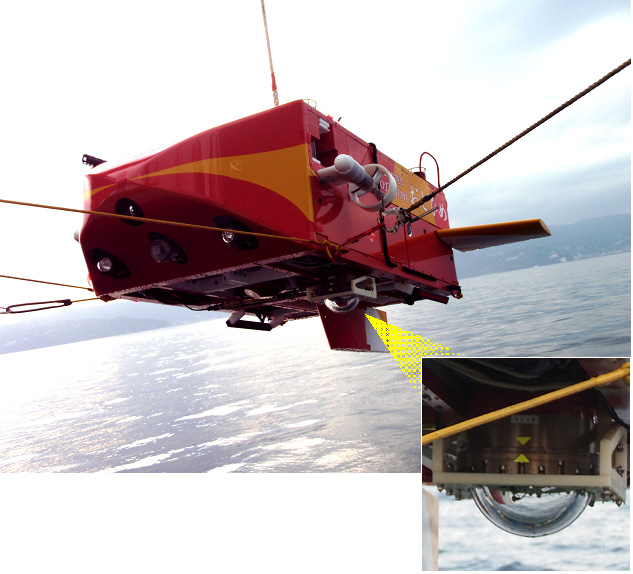
図3 3Dレーザースキャナー搭載時の「おとひめ」
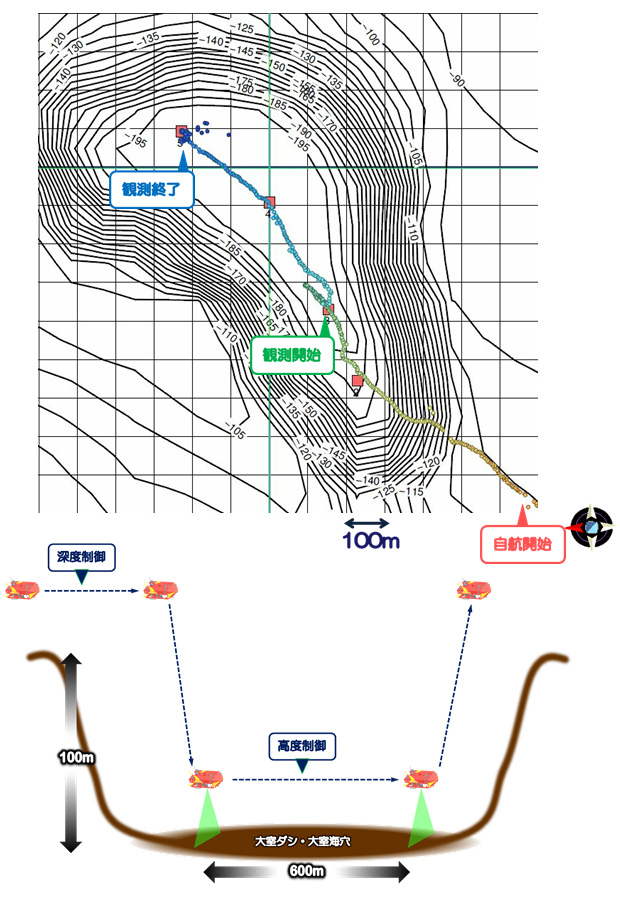
図4 大室海穴内「おとひめ」航行フロー・航跡
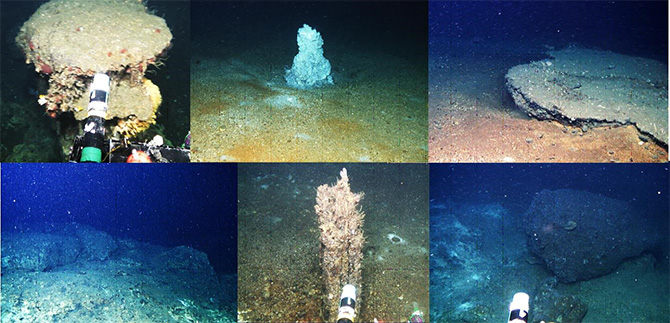
図5 大室ダシ・大室海穴内部
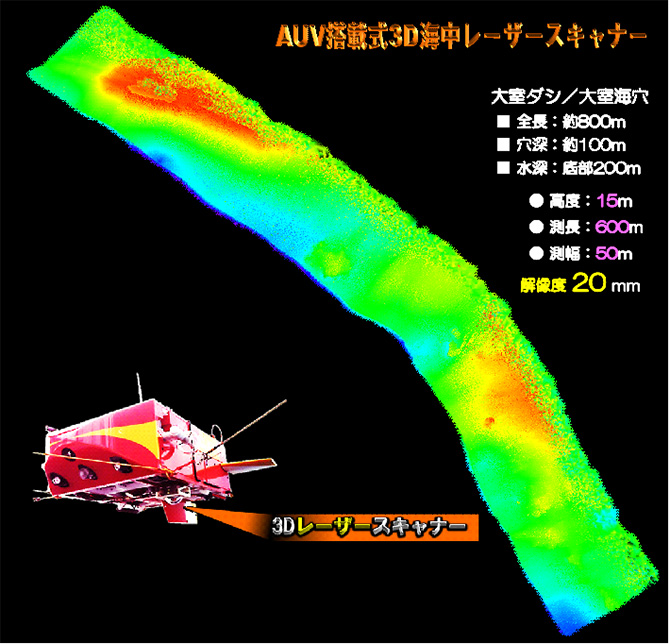
図6 レーザースキャニング画像
(大室海穴内|測線長:600m)
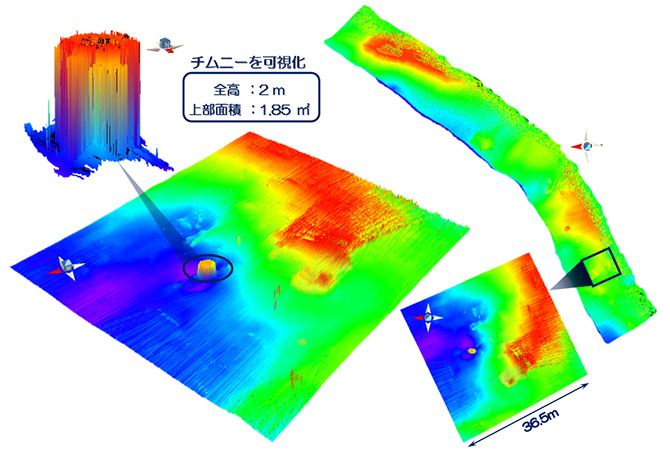
図7 レーザースキャニング画像(チムニー|全高:2m)
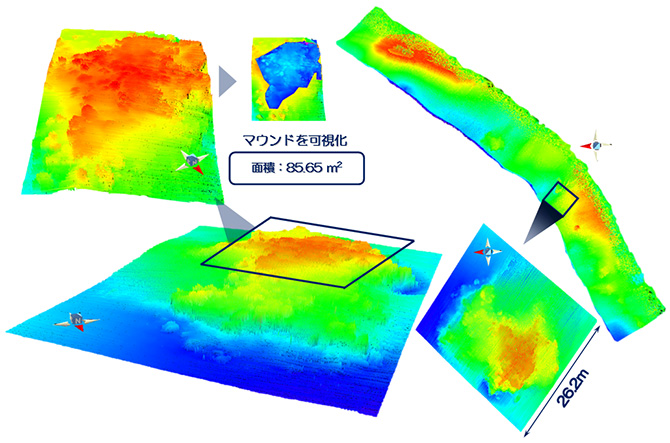
図8 レーザースキャニング画像(マウンド|面積:85.65m2)
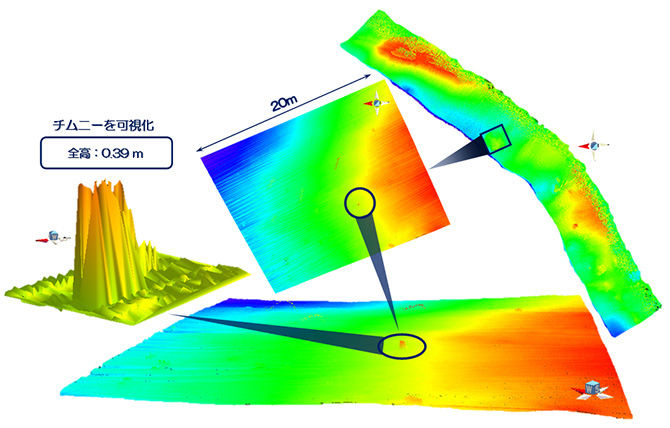
図9 レーザースキャニング画像(チムニー|全高:0.39m)
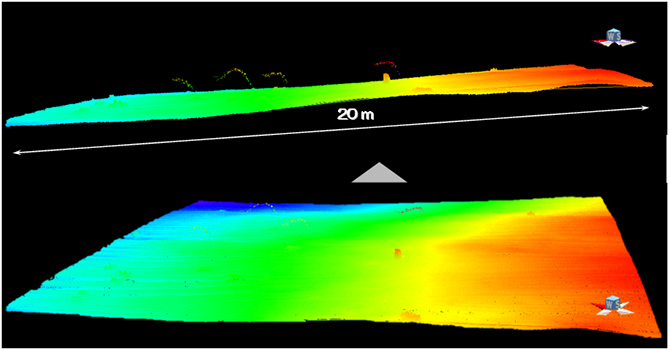
図10 レーザースキャニング画像(熱水域|図9領域拡大図)
図9の視点を変え海底面にほぼ平行な状態の3D画像(上画)を見ると、
計4箇所の熱水噴出域が確認できる。
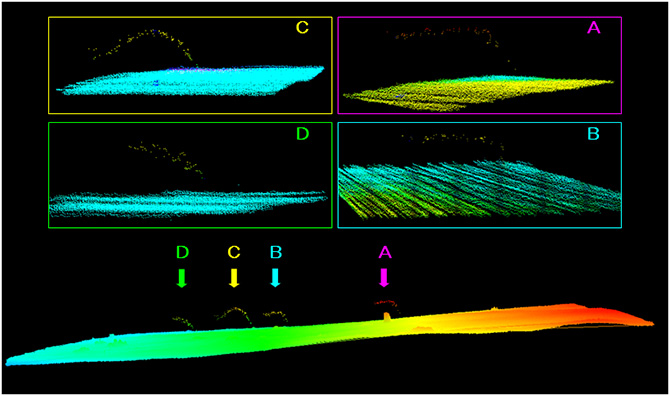
図11 レーザースキャニング画像(熱水域A-D|拡大図)
各熱水噴出箇所を拡大すると、高さ数十cmから1m未満で熱水が噴出しており、
海穴内部の潮流により同方向(画像左方向)に流されているのがわかる。
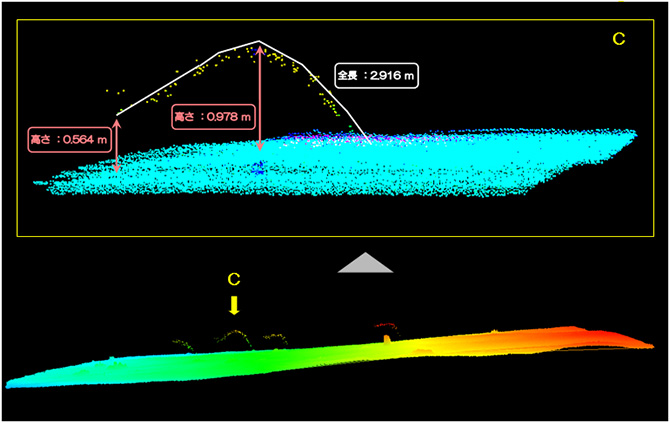
図12 レーザースキャニング画像(熱水域C|拡大図+計測結果)
3次元計測より、熱水噴出箇所のうち最も高さのあるもので約1m、
全長約3m程度の噴出状態であることが確認された。
表1 海中3Dレーザースキャナ―仕様※
| 項目 | 仕様※ |
|---|---|
| サイズ | φ200×535 mm |
| 重量(空中) | 17.2 kg |
| 重量(水中) | 2.1 kg |
| 構造 | 耐圧容器格納型 |
| 耐水圧 | 1000m |
| 仕様温度 | 動作温度:0 - 60 °C 保存温度:-5 - 70 °C |
| 電源電圧 | 24 VDC |
| 消費電力 | 発光時 :840 W (typ.) 非発光時:60.0 W (typ.) |
| 探知距離 | 20m以上 |
| 視野角 | 水平:120 deg 垂直:探査機航走分 |
| 分解能 | 118/89/60/31 mm @20m |
| 水平解像度 | 540/720/1080/2160 pixel |
| スキャニング速度 | 16/22/32/65 msec/line |
| レーザー波長 | 532 nm |
| レーザー出力 | 5 kW(ピーク)| 0.3 W(平均) |
| レーザー方式 | パルス変調 |
| レーザーパルス幅 | 1.0 n sec |
| レーザーパルス周期 | 50 kHz |
- 国立研究開発法人海洋研究開発機構
- (本研究について)
- 海洋工学センター 海洋技術開発部 探査機技術グループ
主任技術研究員 石橋 正二郎 - (報道担当)
- 広報部 報道課長 松井 宏泰