プレスリリース
このプレスリリースには、謎解き解説ページがあります。
2016年 12月 19日
国立研究開発法人海洋研究開発機構
新たな海洋鉱物資源調査システムの海中試験に成功
~汎用ROVを利用して高効率な海洋鉱物資源サンプリング調査が可能に~
1.概要
国立研究開発法人海洋研究開発機構(理事長 平 朝彦、以下「JAMSTEC」という)、次世代海洋資源調査技術研究開発プロジェクトチームROVシステム開発ユニットの村島崇ユニットリーダーらの研究グループは、海洋鉱物資源のサンプリング調査をより効率的に行うための「高効率海中作業システム」(図1)の海中試験に成功しました。
本取り組みは、内閣府が進める戦略的イノベーション創造プログラム(SIP:※1)の課題の一つである「次世代海洋資源調査技術(海のジパング計画)」においてROV(※2)を用いた民間企業の海洋鉱物資源調査への参入を促進することを目的として進めているものであり、日油技研工業株式会社(社長 菊地文男、以下「日油技研」という)、日産自動車株式会社(社長 カルロス・ゴーン、以下「日産」という)及びトピー工業株式会社(社長 藤井康雄、以下「トピー工業」という)と共同で開発を進めています。
開発中の高効率海中作業システムは、目標地点における硬質岩石のコアを採取できるコアリングシステム、採取地点の地形に応じたきめ細かな位置・姿勢制御が可能なクローラーシステム、暗い海底面でも周囲の状況をオペレーターが視認可能とする全周囲画像表示システムから構成され、海底において大容量の電力ならびに油圧の供給能力と機動性を兼ね備える汎用ROVに装着して利用することができるものです。今回の高効率海中作業システムにおいては、全周囲画像表示システムとして、開発が進められているアラウンドビューモニター技術(※3)を世界で初めてROVに導入しました。さらに、クローラーシステムとして、新たにフリッパー型全方向移動クローラー(※4)の開発に取り組みました。このシステムは、ROVの姿勢を変えることなく前後左右に移動が可能な上に、姿勢角度も自由に変更できる機能を有する、世界で初めての移動機構になります。汎用ROVと組み合わせて、海底においてセンチメートル単位で精密に位置や姿勢を調節しながらのコア採取を可能にし、効率の良い海洋鉱物資源の調査を実現できる、機動性とオペレーター支援機能を備えた資源調査システムは世界に類をみないものです。
この度、高効率海中作業システムについて海中での総合作動試験を実施し、汎用ROVと組み合わせた海中試験で初めて、海底で周囲の状況を確認しながら、精密に位置や姿勢を調節して、海底に設置された模擬岩からコアの採取に成功し(図2)、技術の実用化の目処が立ちました。
今後は実海域での実証試験も含めた海中総合作動試験を実施し、高効率海中作業システムの性能向上を図ることで、実際にコバルトリッチクラスト等の海洋鉱物資源調査での活躍につながっていくことが期待されます。
なお、本成果は、12月19日に大崎ブライトコアホールにて開催される「戦略的イノベーション創造プログラム(SIP)第3回次世代海洋資源調査技術シンポジウム」でも紹介します。
2.背景
世界第6位の面積をもつ日本の広大な排他的経済水域には、有望な海洋鉱物資源が存在することが知られていますが、開発対象となり得る鉱床を効率よく調査する技術の開発は未だその途上にあります。特に、海底のコア採取については、目標地点を絞りこんだ上での掘削船や大型の海底設置型掘削装置によるコアリング、機動力のあるROVでの海底面からの岩石や泥の採取といった方法が主流であり、機動的に硬質岩石を採取する場合は、ROVに回転式カッターや振動タガネを装備して岩石を割って採取する等の方法がとられていましたが、作業に時間を要し効率は良くありませんでした。加えて、海洋資源の有望域は海底地形が複雑である場合が多いことも知られており、ROVによる調査は熟練したオペレーターに頼る状態が続いていました。その結果発生する航海期間の長期化および海洋資源調査コストの増大等が、海洋資源調査産業の進展を阻害する一つの要因であるとも言われています。
そこで、これらの問題を解決するため姿勢制御・推進システム(コア採取時に姿勢・位置を調節するクローラーシステムと、その際に周囲の状況を確認するための全周囲画像表示システム)、多点コアリングシステム、音響画像システム(作業時に生じる濁り環境下でも周囲の状況を確認)の3つの要素技術を、汎用ROVに搭載可能な形で開発し、高効率海中作業システムとして構築する必要があり、「次世代海洋資源調査技術(海のジパング計画)」において開発を続けてきました。開発されたシステムの海洋鉱物資源調査等への実用に円滑につなげていくため、各システムの開発に協力いただくメーカーや研究機関、汎用ROVを保有する調査会社等の民間企業と密接に連携しながら開発を進めています。ROVに搭載された複数のカメラにより周囲の画像情報を取得し、取得された画像情報を処理してあたかもROVを俯瞰したような画像の表示が可能なアラウンドビューモニター技術を導入した全周囲画像表示システムを日産と、コア採取時にROVの姿勢を変えることなくセンチメートル単位で位置を調節することとROVの姿勢角を容易に変更することが可能なクローラーシステムとしてフリッパー型全方位移動クローラーをトピー工業と、海中において中性浮力である汎用ROVにおいてコア採取時に作用する反力を低く抑え、低ビット荷重・高速回転で高品質なコア採取を可能とするコアリングシステムについて日油技研と、音響画像システムを国立研究開発法人海上・港湾・航空技術研究所(理事長:大和裕幸、東大名誉教授)港湾空港技術研究所(所長:栗山善昭)と、それぞれ研究開発を進めています。特に、姿勢制御・推進システムについては、日産・トピー工業・JAMSTECの三者で共同研究として開発を進めています。
3.試験内容および成果
開発中の高効率海中作業システムの海中での総合作動試験は、平成28年11月14日から平成28年11月27日の期間で、民間企業が保有する汎用ROVを使用して福岡県の関門港田野浦埠頭岸壁で実施しました。集積された各システムならびに資機材を、高効率海中作業システムとして組上げ、汎用ROVへの搭載作業を実施したのち(図3)、高効率海中作業システムを汎用ROVに装着した形で、陸上ならびに水槽内における作動確認試験(図4)を実施し、先ずはシステムの健全性を確認しました。
次いで、高効率海中作業システムを搭載した汎用ROV(以下、「海中作業ROV」という)を、図1に示すように岸壁に係留された作業台船上に艤装し、海中における総合作動試験を実施しました。岸壁近傍の海底に海中作業ROVを着底させ(図5)、全周囲画像表示システム、クローラーシステム、コアリングシステムのそれぞれが海中で正常に機能することを確認しました(図6)。次いで、海洋鉱物資源コア採取機能の確認を行うために、海底にモルタルで製作した模擬岩(図7)を設置し、コア採取試験を行いました。本試験において、クローラーシステムにより海中作業ROVの位置・姿勢を調整した上で、コアリングシステムによる掘削・引抜を行い(図8)、模擬岩から掘進長に対して100%の回収率のコアを採取することに成功しました(図9)。高効率海中作業システムと汎用ROVが海中作業ROVとして一体となった形で、周囲の状況を一つの画面で同時に確認しながら、センチメートル単位での位置の調整・精密な姿勢角の調整を行った上で、コア採取に成功しましたが、汎用ROVに搭載され、海底においてこれらの機能を組み合わせて実現するシステムは他に類をみません。また、今回の試験で、模擬岩は海底に傾斜して設置されましたが、クローラーシステムによる姿勢の調整と、コアリングシステムに備えられた傾斜に対応しつつ反力を抑えるコア引抜機構によって、良質なコアが採取できました。このような傾斜に対して従来海洋鉱物資源調査に使用されているより大型の海底着座型掘削装置などでは対応が難しく、本システムのコア採取への有用性が示されました。
今回の海底における各システムの機能の確認ならびにコア採取の成功によって、高効率海中作業システムを海洋資源調査に適用していく上での基本性能が確認され、今後想定される実海域におけるコア採取の実証に向けて前進することができました。
4.今後の展望
今回の試験において海底でのコア採取機能の確認ができました。今回の試験は、浅海域で実施したものでしたが、使用したシステムは深海の海洋鉱物資源調査等で使用する際とほぼ同一のシステム構成となっています。このことは、本システムの深海における運用が間近であることを示しています。今後は実海域における実証を念頭に、各システムの開発に協力いただいているメーカーや研究機関、汎用ROVを保有する調査会社等の民間企業と密接に連携し引き続き開発を進めていくとともに、コバルトリッチクラスト等の海洋鉱物資源調査での利用を進めていきます。
※1 戦略的イノベーション創造プログラム(SIP)
総合科学技術・イノベーション会議(CSTI)が自らの司令塔機能を発揮して、府省の枠や旧来の分野の枠を超えたマネジメントに主導的な役割を果たすことを通じて、科学技術イノベーションを実現するために平成26年度より5カ年の計画で新たに創設したプログラム。CSTIにより選定された11課題のうち、「次世代海洋資源調査技術(海のジパング計画)」(プログラムディレクター 浦辺 徹郎、東京大学名誉教授、国際資源開発研修センター顧問)ではJAMSTECが管理法人を務めており、海洋資源の成因に関する科学的研究、海洋資源調査技術の開発、生態系の実態調査と長期監視技術の開発を実施し、民間企業へ技術移転する計画となっている。
※2 ROV(Remotely operated vehicle)
遠隔操作型無人機。母船とケーブルで繋がれている。ケーブルを介して母船上から電力の供給を受け、母船上からの遠隔操作で駆動される。特に海底石油・ガス開発等の分野などで、市販の作業用ROVが海底での各種作業に広く用いられている。汎用ROVは、これら各種作業に広く用いられている市販の作業用ROVを指す。
※3 アラウンドビューモニター技術
車の真上から見ているかのような映像によって周囲の状況を知ることで、駐車を容易に行うための運転支援技術。日産が2007年に世界で初めて市販化し、その後2011年に移動物検知機能を追加する等、進化を続けている。
※4 フリッパー型全方向移動クローラー
東北大学大学院情報科学研究科多田隈建二郎准教授の全方向移動クローラー機構の研究成果を基にトピー工業が独自に開発を進めたクローラー機構。
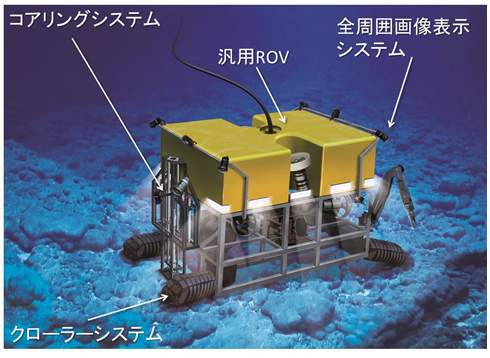
図1 「高効率海中作業システム」

図2 今回海中試験を行った高効率海中作業システム

図3 汎用ROVへの搭載作業
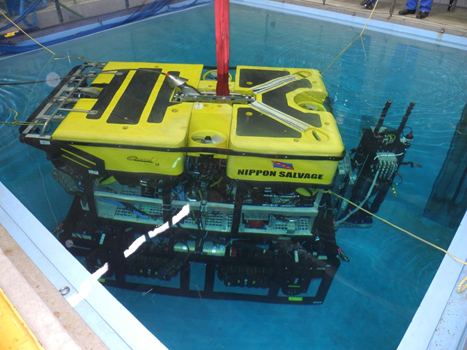
図4 水槽における作動確認試験
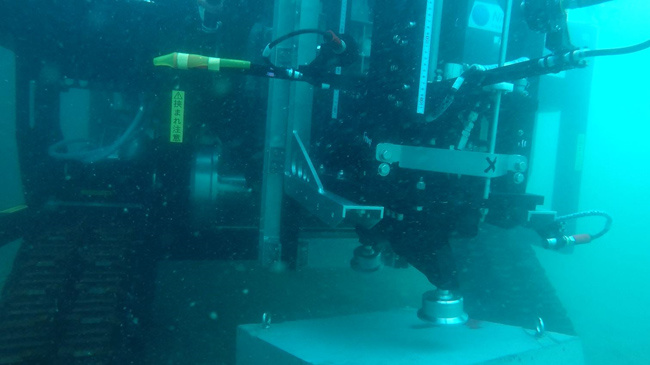
図5 着底した海中作業ROV
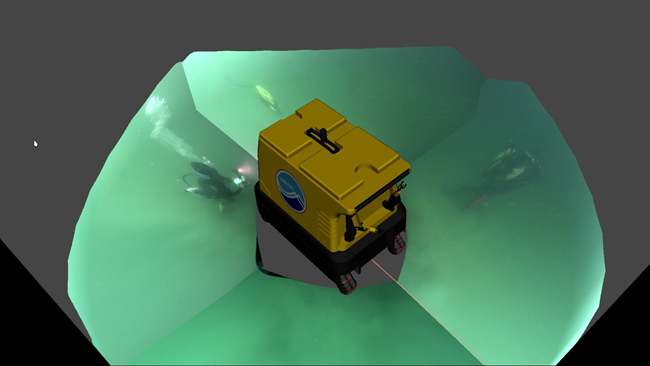
図6 全周囲画像表示システムで取得された全周囲画像の例
(周囲のダイバーや小型ROVが視認されている)

図7 掘削試験に使用した模擬岩
(モルタル製)
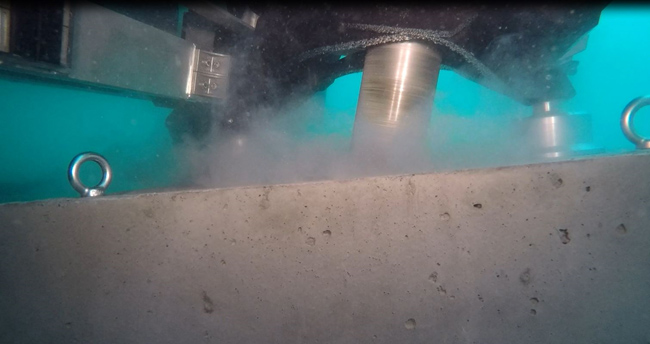
図8 海底での模擬岩の掘削

a.海底での模擬岩からのコア採取

b.採取されたコアと回収された模擬岩
図9 コア採取状況
新たな海洋鉱物資源調査システムの海中試験に成功
~汎用ROVを利用して高効率な海洋鉱物資源サンプリング調査が可能に~
【日産自動車より発表】
日産自動車、 アラウンドビューモニター技術を活用した遠隔操作無人探査機の水中実験に成功
【トピー工業より発表】
世界初のフリッパー型全方向移動クローラーを開発、海洋資源調査に展開
- 国立研究開発法人海洋研究開発機構
- (本内容について)
- 次世代海洋資源調査技術研究開発プロジェクトチーム ROVシステム開発ユニット
ユニットリーダー 村島 崇 - (報道担当)
- 広報部 報道課長 野口 剛