Press Releases
JAMSTEC
Successful Sea Trials of New Ocean Mineral Resources Exploration System
- Enabling highly efficient ocean mineral resource sampling using ROV -
1. Overview
The research group led by Takashi Murashima, the Unit leader of the ROV System Development unit, Next-generation Technology for Ocean Resources Exploration project team, Japan Agency for Marine-Earth Science and Technology (JAMSTEC: Asahiko Taira, President), has successfully completed the sea trials of a “highly efficient subsea operation system” (Fig. 1) to perform efficient sampling in ocean mineral resources exploration.
This initiative is a part of the joint development work with NiGK Corporation (President: Fumio Kikuchi), Nissan Motor Co., Ltd. (President: Carlos Ghosn), and Topy Industries, Ltd. (President: Yasuo Fujii) for the purpose of promoting the entry of private enterprises into ocean mineral resource exploration using ROVs*1. This is associated with the “Next-generation Technology for Ocean Resources Exploration (Zipangu in the Ocean Program)” initiative, a part of the “Cross-ministerial Strategic Innovation Promotion Program (SIP)*2” led by the Cabinet Office.
The highly efficient subsea operation system consists of a coring system that can collect hard rock ore samples from the target location, a crawler system that can be used to control the position and attitude minutely according to the topography of the sampling location, and an omnidirectional image display system that can be used by the operator to visually recognize the surroundings even on a dark seabed. This system can be used in subsea operations by mounting it on a ROV with large capacity electric power and hydraulic pressure supply, and good manoeuvrability. The around view monitor technology*3 has been deployed for the first time in the world in this highly efficient subsea operation system. In addition, a new flipper-type omni-directional crawler*4 has been designed for the crawler system. This system is the first movement mechanism in the world that permits free movement in the forward/backward/left/right directions and the attitude angle without changing the ROV orientation. By integrating this system with a ROV, a resource exploration system with unprecedented manoeuvrability and operator assistance capability was realized. This system is capable of collecting core samples with precise positioning and attitude change adjustments in the range of centimetres.
The highly efficient subsea operation system, along with a ROV, has successfully completed the sea trials for overall operations by collecting a core sample from a test rock placed on the seabed (Fig. 2). It can adjust the position and attitude precisely while visually confirming the surrounding conditions on the seabed. This system is now ready for practical applications.
After verifying the performance of the highly efficient subsea operation system through overall subsea operation tests including demonstration tests on the actual seabed in the future, this system is expected to be used to facilitate research on ocean mineral resources such as cobalt-rich crusts.
The results of these experiments will be presented at the “Third Symposium on Next-generation Technology for Ocean Resources Exploration, Cross-ministerial Strategic Innovation Promotion Program (SIP)” at the Osaki Bright Core Hall on December 19.
*1. Cross-ministerial Strategic Innovation Promotion Program (SIP)
In 2014, the Cross-ministerial Strategic Innovation Promotion Program (SIP) was established with a 5-year plan as a national project for science, technology, and innovation, spearheaded by the Council for Science, Technology and Innovation (CSTI) as it exercises its headquarters function to accomplish its role in leading science, technology and innovation beyond the framework of government ministries and traditional disciplines. A total of 11 issues has been identified by the CSTI. JAMSTEC is responsible for the “Next-generation Technology for Ocean Resources Exploration (Zipangu in the Ocean: Tetsuro Urabe acting as Program Director, Professor Emeritus at Graduate School of Science, the University of Tokyo / Advisor at Japan Mining Engineering & Training Center), carrying out scientific research on ocean resource genesis, development of ocean resource exploration technology and ecosystem research with its long-term monitoring technology. The plan thus far is that these technologies will be directly applicable to private sectors.
*2. ROV (Remotely operated vehicle)
This refers to an unmanned vehicle that is operated remotely. An ROV is tethered to the mothership via cables. It receives power supply from the mothership via these cables, and is controlled remotely from the mothership. Commercially available ROVs are widely used for various operations on the seabed, especially offshore oil and gas field exploration. A typical ROV refers to an ROV that is commercially available for a wide variety of such operations.
*3. Around view monitor technology
This technology assists drivers in parking by making them aware of a vehicle’s surroundings through a virtual bird’s-eye view. The technology was first marketed by Nissan Motor Co. in 2007 and augmented with moving object detection function in 2011, and it continues to evolve.
*4. Flipper-type omni-directional crawler
It is a crawler mechanism independently developed by Topy Industries based on research by Prof. Kenjiro Tadakuma, Graduate School of Information Sciences, Tohoku University.
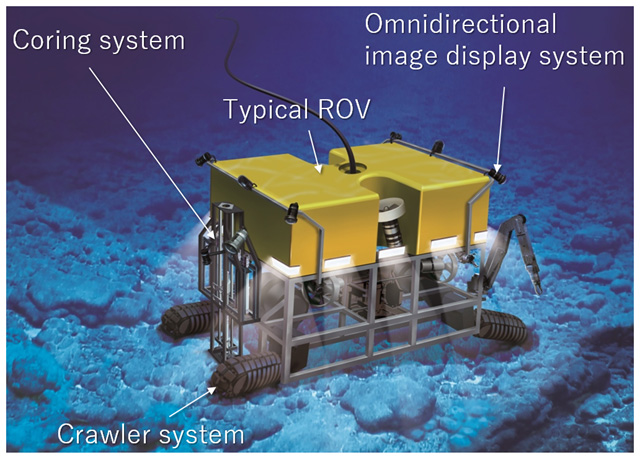
Figure 1. Highly efficient subsea operation system

Figure 2. Highly efficient subsea operation system used in the sea trials

Figure 3. Installation work on a ROV
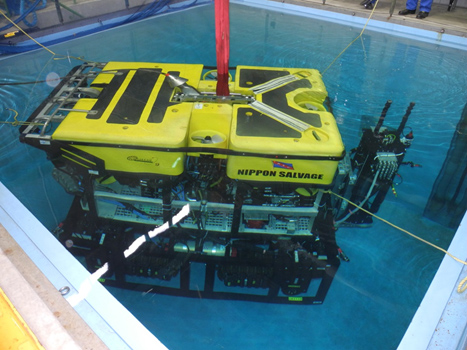
Figure 4. Operation tests in a tank
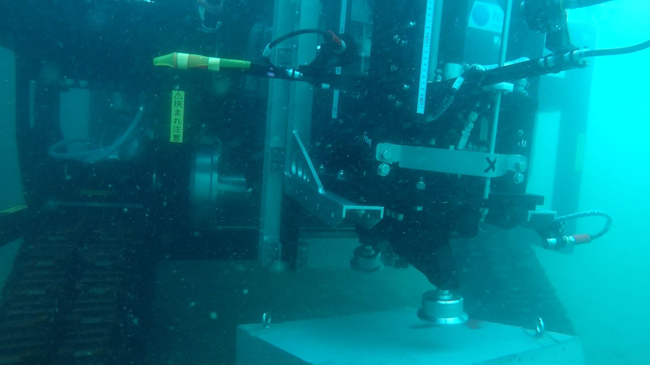
Figure 5. ROV used in the subsea operation on the seabed
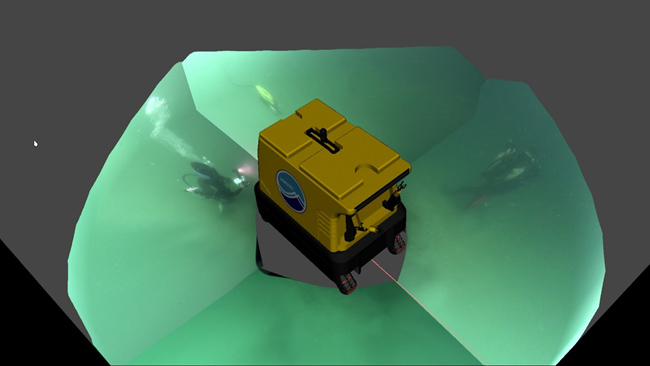
Figure 6. Example of an around view image captured by the around view image display system
(Nearby divers and the small ROV are visible)

Figure 7. A test rock used in the drilling tests
(made of mortar)
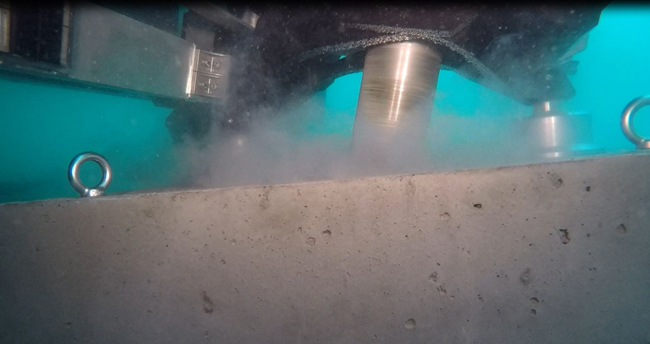
Figure 8. Drilling of the test rock on the seabed

a. Removing a core sample from the test rock on the seabed

b. The core sample and the retrieved test rock
Figure 9. Core sampling
Successful Sea Trials of New Ocean Mineral Resources Exploration System
- Enabling highly efficient ocean mineral resource sampling using ROV -
Contacts:
- (For this project)
- Takashi Murashima, Unit Leader, ROV System Development Unit, Project Team for Development of New-generation Research Protocol for Submarine Resources
- (For press release)
- Tsuyoshi Noguchi, Manager, Press Division, Public Relations, JAMSTEC