Press Releases
JAMSTEC
In a world first, an autonomous underwater vehicle succeeds in automatically retrieving data from an ocean-bottom station using underwater optical wireless communications
1. Key Points
- ◆
- An autonomous underwater vehicle automatically retrieved data from equipment mounted on seabed for observation.
- ◆
- For the first time, an autonomous underwater vehicle automatically retrieved data using optical wireless communication.
- ◆
- Autonomous underwater vehicles can retrieve data from several seabed observation equipment (instruments) by patrolling (harvesting), which can be applied to various seabed observation applications, such as efficient seismic observation.
2. Overview
Takao Sawa (Senior Researcher), Takeshi Nakatani (Group Leader), and Yousaku Maeda (Senior Technician) affiliated with the Engineering Department, Institute for Marine-Earth Exploration and Engineering (MarE3), JAMSTEC have succeeded in automatically retrieving observation data from an observation system installed on the seabed using an autonomous underwater vehicle (hereinafter referred to as "AUV") by utilizing underwater optical wireless communication devices.
In conventional seabed-mounted observation equipment, retrieving and re-installing the instrument is essential to retrieve observation data. However, retrieval and re-installation are laborious and expensive tasks, and result in observational discontinuities that deteriorate data quality.
The method of automatic retrieval of data from seabed instruments by an AUV is also called “harvesting (※ 1)”, which was demonstrated underwater for the first time in the world. This method will, in the future, result in a reduction in observational costs and an improvement in data quality.
3. Background
Most of Japan's vast exclusive economic zone (EEZ) is deep sea, and many automated observation instruments are used for its exploration. Most seabed-mounted observation instruments are battery-powered automated instruments. However, conventional wireless communication cannot be used in such cases because neither light nor radio waves can reach far underwater. Therefore, the instruments had to be retrieved for observation data retrieval, and the large costs of retrieving and reinstalling them using ships presented a challenge.
Moreover, for continuous observation, the observation location and installation status should remain the same, and continuity must be maintained. However, in the conventional method of using ships to retrieve the device from the seabed and subsequently re-installing it by free-fall installation, the discontinuity of observation conditions cannot be avoided, which results in deteriorated data quality.
This research group, in collaboration with Shimadzu Corp., has been developing technology enabling underwater optical wireless communication (press releases dated October 2, 2017, and March 29, 2019). In this study, using the technology developed so far, researchers attempted to retrieve only data (harvesting) from seabed-mounted observation instruments using underwater optical wireless communication devices establishing underwater Wi-Fi connections with AUVs patrolling the deep seafloor.
4. Results
Ocean lander for deep sea benthic observation “FFC11K” (Fig. 2) was placed on deep seabed at 1420 m in Sagami Bay (Fig. 1), while AUV “AUV-NEXT” (Fig. 3) was made to autonomously approach it close and collect data using optical communication devices installed in them (Fig. 4). The aim was to retrieve an image of the seabed captured using a 4 K resolution camera installed on FFC11K. Because patrolling AUVs cannot approach the seabed closely at low speeds and mobility performance deteriorates at low speeds, the AUV navigated and passed over FFC11K at a certain depth and at a cruising speed. Even for a short duration of the AUV passing over FFC11K (approximately 10 s), an underwater image (approximately 130 KB) of the seabed captured by the FFC11K (Fig. 5) was successfully retrieved using optical communication. To our knowledge, this is the first such case in the world.
Note that the optical wireless communication status was transmitted from the AUV to the support ship “Yokosuka” using acoustic communication, whereby it was constantly monitored by the operator. Moreover, this sequence of operations, except for issuing a command to approach the target, was performed autonomously.
5. Future prospects
When adopting this method for deep-sea seabed observations, even in oceanic areas without underwater cables, it is not necessary to use ships to retrieve the observation instruments. AUVs can automatically retrieve data at arbitrary times, thereby enabling continuous observations at the same location.
This method could be used in fields such as observation of seabed crustal movement using sensors such as pressure gauges, wherein high-frequency data retrieval is desirable.
In addition, the success of this project has significantly advanced the effort toward the ultimate goal of “automatic seabed observations”, wherein AUVs departing from coastal bases will autonomously patrol multiple underwater observation instruments before returning to the bases retrieving only the observation data.
In the future we want to improve the communication device, enhance the data retrieval method, explore more efficient ways to retrieve data, and aim for further advancement of the system.
【Supplemental Information】
- ※ 1
- Harvesting
In general, it implies collecting well-grown crops such as fruits, but recently, the term has also been used to refer to operations involving retrieval of accumulated data or charged energy.
Fig. 1 Experimental area
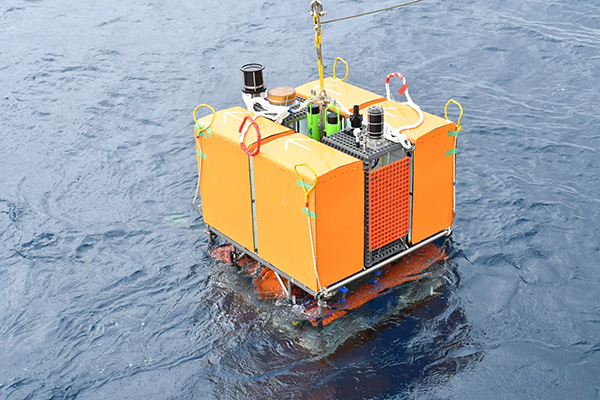
Fig. 2 Ocean lander for deep sea benthic observation “FFC11K”
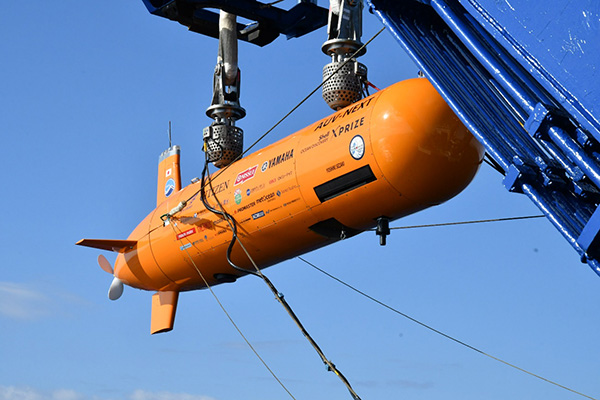
Fig. 3 Autonomous Underwater Vehicle「AUV-NEXT」
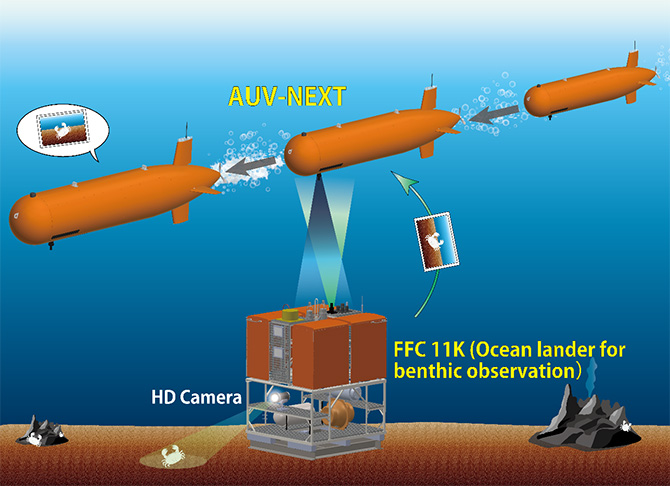
Fig. 4 Schematic of data retrieval operation

Fig. 5 Example of an image captured by FFC11K and then retrieved by AUV-NEXT
Contacts
- (For this study)
- Takao Sawa, Senior Researcher, Institute for Marine-Earth Exploration and Engineering (MarE3), Engineering Department, Marine Robotics Engineering Group, JAMSTEC
- (For press release)
- Press Office, Marine Science and Technology Strategy Department, JAMSTEC