歩行における左右の足の交互運動は厳密には制御されていない ―歩行障害の原因究明、新たなリハビリ手法・歩行支援装置への応用に期待―
海洋研究開発機構
京都大学
科学技術振興機構
我々は、左右の足を交互に前に出して歩きます。この左右交互の関係性が崩れてしまうと歩行機能の低下を招くため、左右の足はきっちりと交互に前に出すように比較的厳密に制御されていると予想されていましたが、歩行における複雑な身体運動のために、その実態は未解明でした。
大阪大学大学院基礎工学研究科の青井伸也教授、海洋研究開発機構の荒井貴光研究員、京都大学大学院情報学研究科の青柳富誌生教授らの研究グループは、左右の足を協調的に動かす肢間協調の制御様式を位相縮約理論※1 に基づく位相振動子※2 を用いてモデル化し、健常者の歩行中の計測データ(図1)を用いたベイズ推定※3 により推定しました。その結果、これまでの予想に反して、左右の足の交互運動は、左右交互の関係から少しくらい外れても、元に戻そうとするような制御は働いておらず、この関係性は必ずしも厳密には制御されていないことを世界で初めて明らかにしました。
歩行中の左右の足の協調性は加齢や脳疾患によって減退してしまい、歩行機能の低下を招いてしまいます。本研究成果により明らかにした肢間協調の制御様式が加齢や脳疾患によってどのように変化するかを今後調べることで、歩行機能が低下する原因の究明や、新たなリハビリ手法・歩行支援装置の開発などにつながると期待されます。
本研究成果は、英国科学誌「Communications Biology」に、9月20日(火)18時(日本時間)に公開されました。
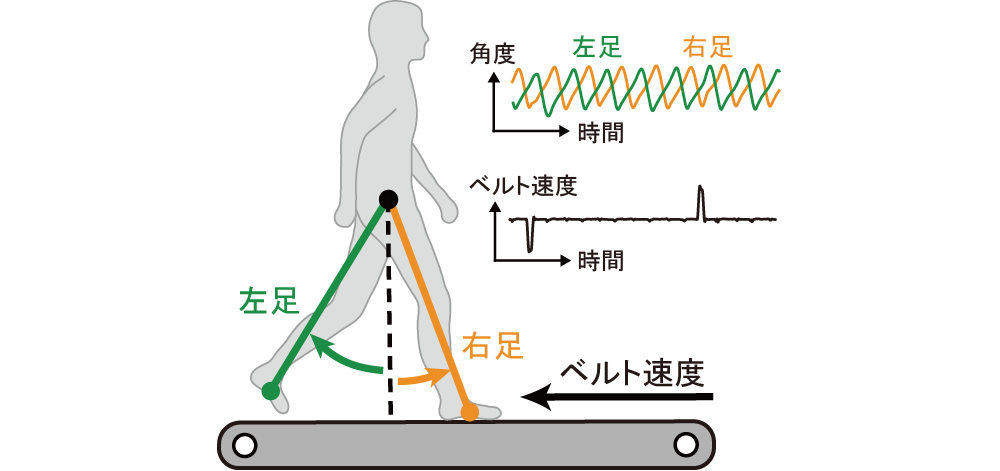
図1 歩行計測実験
位相縮約理論
周期的な閉軌道(リミットサイクル)を有する多次元からなる力学システムを、位相振動子を用いて近似的に記述する数学的手法。
位相振動子
周期的な振る舞いを位相を用いて記述するもの。
ベイズ推定
観測事象から、推定したい事柄を確率的な意味で推論すること。
詳細は 大阪大学のサイトをご覧ください。
海洋科学技術戦略部 報道室