8,000m級AUV「うらしま8000」からの音響通信によるソーナー画像のリアルタイム伝送に成功 ―その場の観測データに基づいた、潜航中の柔軟なシナリオ変更が可能に―
1. 発表のポイント
- 深度8,000mまで潜航可能な航行型のAUV※1 深海巡航探査機「うらしま8000」(以下「うらしま8000」)(図1)に、海底マッピングしたソーナー画像を水中音響通信※2 によってリアルタイムで海上の母船に伝送する機能を搭載した。
- 2025年11月に行った深度約7,000m~7,500mでの試験潜航では、この装置により伝送されたサイドスキャンソーナー※3 画像から、海底面の数m程度の海底構造物や特徴的な海底地形を、船上において識別可能であることを示した。
- 従来、ソーナー画像のような容量の大きい観測データは、AUVが船上に揚収されてからでないと確認することができなかったが、この装置の搭載により、その場のマッピング結果に基づいたシナリオ変更を潜航中に行うことが可能となった。これにより、調査効率の大幅な向上が期待される。
図1 「うらしま8000」
AUV(Autonomous Underwater Vehicle)
無索の海中無人探査機の総称。全自動で広範囲の調査が可能。近年は、AIによって自律機能を高める取り組みが進められている。
水中音響通信
海中では電磁波は吸収されてしまうため、近距離の場合を除いて、通信や測位には音波が用いられる。
サイドスキャンソーナー
ソーナーは、空中におけるレーダーのように、海中において音波を送受信することで物体探知などを行う装置。このうち、サイドスキャンソーナーは、左右のやや下方に音波を送信・受信しながら機体が航走することで海底の凹凸を計測する。
2. 概要
国立研究開発法人海洋研究開発機構(理事長 河村 知彦、以下「JAMSTEC」という。)技術研究開発部門では、「うらしま8000」の開発を進めてきました。この「うらしま8000」には、JAMSTECが独自に開発した高速音響通信/通信測位統合装置※4 によるソーナー画像の伝送機能を搭載しています。
2025年11月6日から11月26日に実施した試験航海(日本海溝水深約7,000mの海域)では、サイドスキャンソーナーにより、海底の掘削孔に設置された孔口装置(数mサイズの金属製の構造物)や掘削孔の孔口を捉えることに成功しました(図2)。さらに、このソーナー画像を音響通信により支援母船に伝送し、特徴的な地形や構造物を船上で確認することが出来ました。
このように、「うらしま8000」では、潜航中にもリアルタイムで海底の状態を継続的に確認することができることから、観測結果を見た科学者による研究対象に応じた追加調査のための船上からの測線変更指示や、サンプル採取等の次の段階の調査計画の速やかな立案が可能となります。これは、今後の海洋調査の大幅な迅速化への寄与が期待できる成果です。
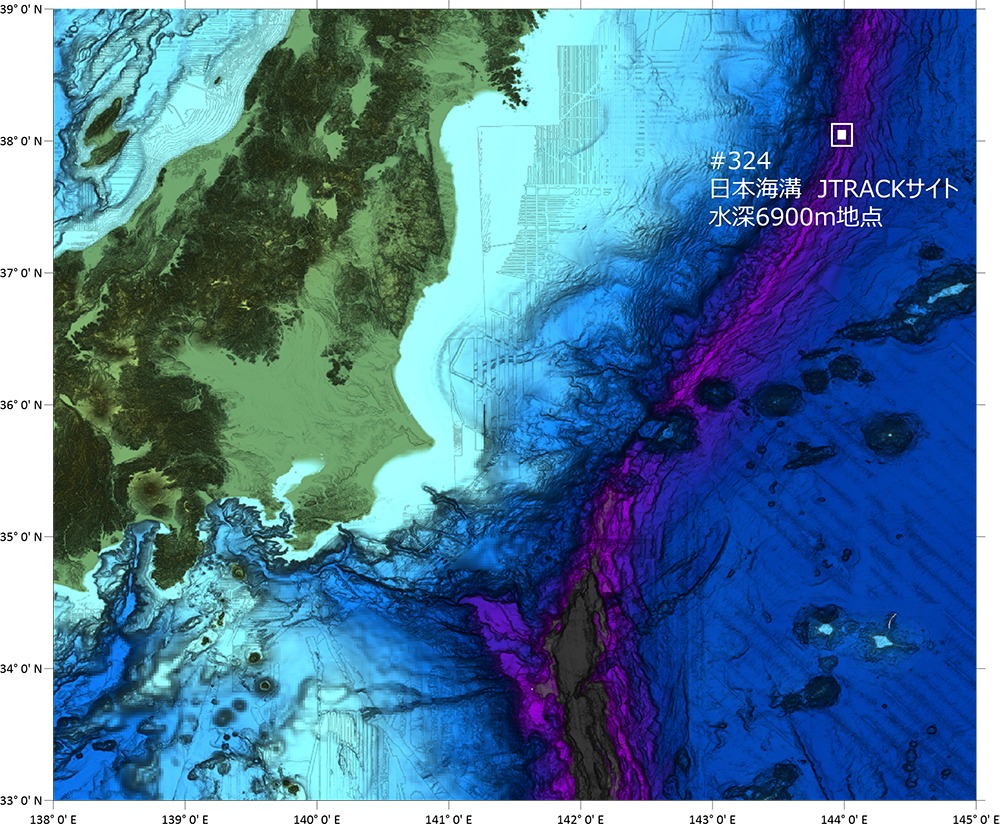
図2 11月15日から16日の潜航海域
高速音響通信/通信測位統合装置
2018年に、「しんかい6500」に搭載するために機構が独自に開発した高速音響通信装置。この装置では、深度6,500mから実効通信速度(信号長に対するトレーニング信号のような既知のデータを除いたデータの伝送速度)で、約80kbpsの伝送を実現している。さらに2022年には、測位機能と統合化することで、高頻度で確実な通信と測位を可能とする装置を開発した。
(参考)https://www.jamstec.go.jp/engd/j/uatrg.html
3. 背景
JAMSTECでは2025年度まで、超深海の詳細調査を可能とするため、これまで深度3,500mまでの潜航が可能であった航行型AUV「うらしま」を、深度8,000mまで潜航可能となるよう、改造を進めてきました(2025年7月30日既報)。
広範囲の海底地形図を作成するためには、海底において出来るだけ長い観測時間を確保することが必要です。加えて、観測対象が超深海の場合、潜航及び浮上にも時間がかかります(「うらしま8000」の場合、深度8,000mへの潜航に3時間、浮上に1時間半かかる)。一方、従来の音響通信では、AUVの位置情報や電池残量、速力、姿勢などの機体の状態を示す数値データは伝送できるものの、データ量の大きいソーナー画像などの観測データは伝送できませんでした。そのため、そのような観測結果の確認は機体の船上への揚収後となり、潜航中に研究対象として重要な観測結果が得られていたとしても、追加データの取得のためには、限られた調査日程の中で再度AUVを同じ海域に潜航させなければなりませんでした。加えて、悪天候により予定された潜航が出来ない場合には、追加調査が出来ず、研究成果の創出に十分なデータを入手できないまま調査日程を終えなければならない懸念もあり、AUVの取得したデータをリアルタイムに確認できないことは、AUVの運用における大きな課題の一つとなっていました。
4. 成果
2025年11月6日から11月26日に実施した試験航海(YK25-17)において、「うらしま8000」から船上への、音響通信によるソーナー画像の伝送に成功しました。
この航海の潜航では、サイドスキャンソーナーの受信信号から、解像度を下げた信号を最大約58kbps(インターバルなども含んだ実時間に対するユーザデータの伝送速度)で伝送しました。
特に、11月15日から16日にかけて実施した、地球深部探査船「ちきゅう」で行った研究航海JFAST※5 及びJTRACK※6 の掘削地点付近の潜航では、明瞭な音響反射を捉えていたことを、船上においてほぼリアルタイムで確認することが出来ました(図3)。帰港後、詳細なデータ解析を行った結果、「うらしま8000」で捉えた明瞭な音響反射が、過去にサイドスキャンソーナーに映った金属製の物体からの音響反射と類似していること及び反射が強い地点と弱い地点と近接していること、さらにそれらの位置関係がJTRACK及びJFASTにおける複数の掘削地点及び孔口装置の設置地点と一致していることから、これらの明瞭な音響反射は、JTRACK及びJFASTでの孔口及び孔口装置を捉えていたと断定しました(図4)。つまり、伝送されたデータによるソーナー画像であっても、海底面からの高さが2~5mの金属製の海底設置物や、直径2m程度の海底面の凹凸も識別できる解像度であり、海底の特徴を十分観察できる分解能であることが確認できました。
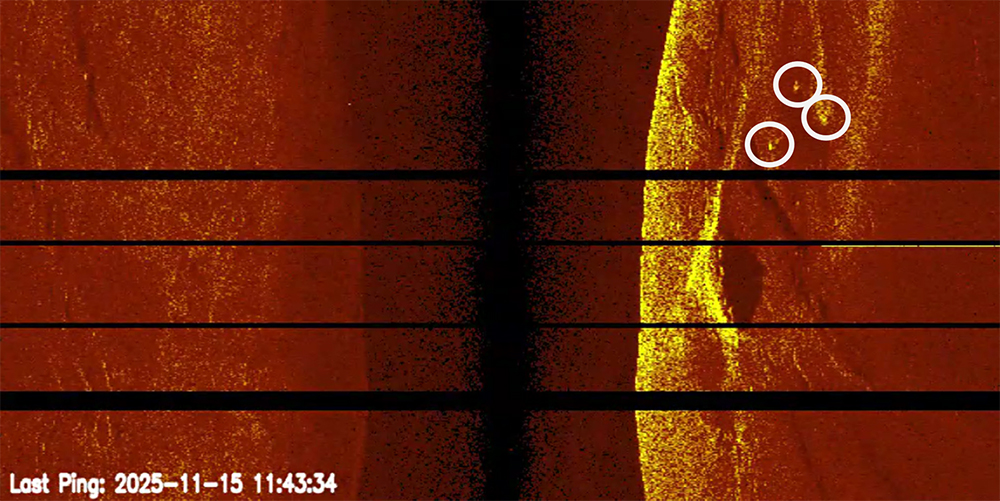
図3 船上においてリアルタイムで確認した明瞭な音響反射(白丸内)
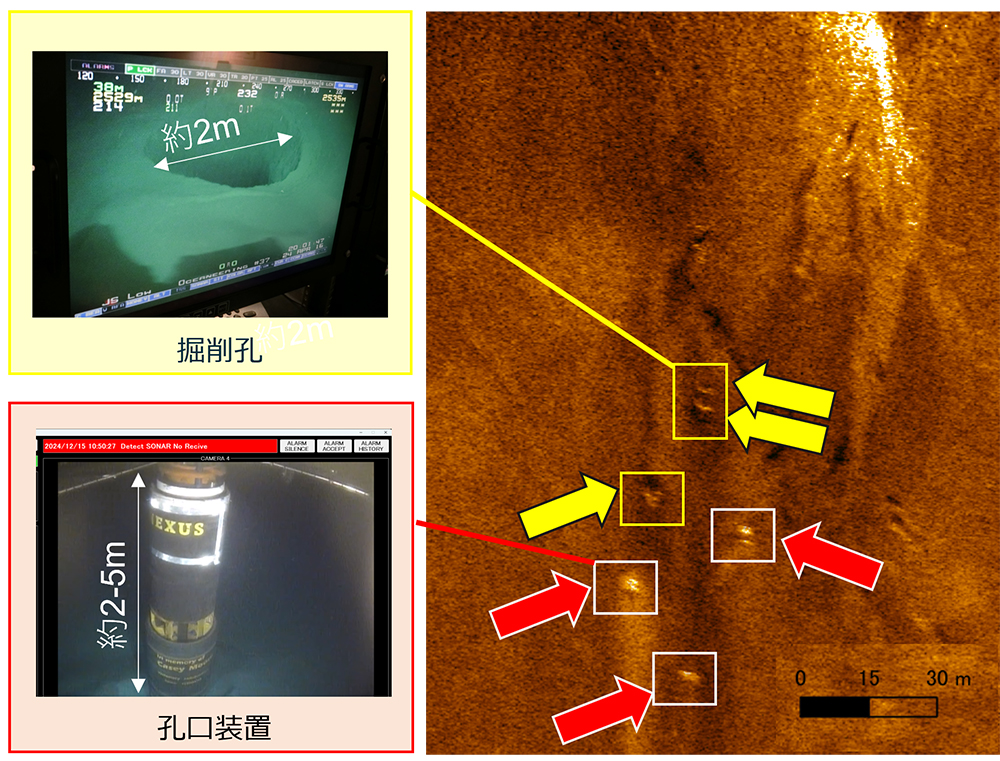
図4 処理後のサイドスキャンソーナーデータと、断定した孔口及び孔口装置
JFAST
統合国際深海掘削計画(IODP)の枠組みで行われた、地球深部探査船「ちきゅう」を用いた研究航海「東北地方太平洋沖地震調査掘削(Japan Trench Fast Drilling Project)」。掘削により断層を含む地質試料の採取に成功するとともに、長期孔内温度計を設置しました。
JTRACK
国際深海科学掘削計画(IODP)の枠組みで行われた、地球深部探査船「ちきゅう」を用いた研究航海「日本海溝巨大地震・津波発生過程の時空間変化の追跡(Tracking Tsunamigenic Slip Across the Japan Trench)」。プレート境界断層を含む一連のコアを取得したほか、掘削した孔井に長期孔内温度計測システムを設置しました。
5. 今後の展望
日本周辺には、列島に沿うように日本海溝、伊豆・小笠原海溝、南海トラフといった超深海が広がり、海溝型巨大地震・津波に関する研究や新種の生物の発見等、社会課題の解決や人々の探求心を掻き立てる可能性を秘めています。
AUVへの高速音響通信/音響通信測位統合装置の搭載や、それを活用したリアルタイムデータ伝送により、観測結果を見た研究者による、研究対象に応じた追加調査のための船上からの測線変更指示、調査結果に応じた別の探査機の投入、サンプル採取といった次の段階の調査に迅速に移行することが可能となります。
さらに、AUVを用いた海洋調査・海洋観測は、人的リスクの回避や人口減少という環境の中、洋上風力発電をはじめとする海洋産業の拡大や海洋安全保障の取組みへの活用が進んでいます。観測データがリアルタイムに確認できることによって、これらの取組みにおけるAUVの活用をより一層広げることにも貢献します。
お問い合わせ先
(本研究について)
技術研究開発部門 海洋技術研究センター水中音響技術研究グループ グループリーダー 渡邊 佳孝 技術研究開発部門 システム研究開発センター
探査システム開発グループ グループリーダー代理 中谷 武志
(報道担当)
企画部門 事業推進部 報道室