

Summary
The present invention provides a system technology for improving the reliability of acoustic communication between a watercraft ASV2 that are navigating over water and an unmanned underwater vehicle AUV1, and has the following configuration.
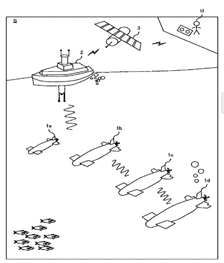
1) This system controls multiple AUVs by ASV.
2) The ASV establishes communication and positioning with any reference AUV among the multiple AUVs after it is deployed in the sea area together with the multiple AUVs.
3) The other AUVs move to a position away from the reference AUV by a certain distance to form a platoon line at regular intervals, and in that state, the AUV platoon together with the ASV conducts an investigation.
4) When multiple AUVs line up in a row and sail, the measurement ranges of the sensors of the multiple AUVs are linked side by side and exhibit the same performance as the ultra-wide range sensor.
5) By controlling the altitude according to the performance of the AUV sensor, it is possible to arbitrarily set the resolution and data of the seabed topography to be acquired.
Although it is possible to position multiple AUVs from the ASV, it may be difficult to establish 1:1 communication with all AUVs due to the positional relationship of the AUVs. The following configuration is provided for that case.
6) Assign IDs to all controlled AUVs, and send IDs with ID information. The received AUV confirms the ID of the received information, and if it is different from its own ID, transmits the received signal again to the surroundings. As a result, the underwater acoustic communication propagates like a message game, the range in which the acoustic communication from the ASV is possible is expanded, and the reliability of the underwater acoustic communication is improved.
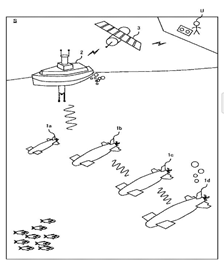
1) This system controls multiple AUVs by ASV.
2) The ASV establishes communication and positioning with any reference AUV among the multiple AUVs after it is deployed in the sea area together with the multiple AUVs.
3) The other AUVs move to a position away from the reference AUV by a certain distance to form a platoon line at regular intervals, and in that state, the AUV platoon together with the ASV conducts an investigation.
4) When multiple AUVs line up in a row and sail, the measurement ranges of the sensors of the multiple AUVs are linked side by side and exhibit the same performance as the ultra-wide range sensor.
5) By controlling the altitude according to the performance of the AUV sensor, it is possible to arbitrarily set the resolution and data of the seabed topography to be acquired.
Although it is possible to position multiple AUVs from the ASV, it may be difficult to establish 1:1 communication with all AUVs due to the positional relationship of the AUVs. The following configuration is provided for that case.
6) Assign IDs to all controlled AUVs, and send IDs with ID information. The received AUV confirms the ID of the received information, and if it is different from its own ID, transmits the received signal again to the surroundings. As a result, the underwater acoustic communication propagates like a message game, the range in which the acoustic communication from the ASV is possible is expanded, and the reliability of the underwater acoustic communication is improved.
Schematic image
Application
Ocean survey, seafloor survey
Relational patent
Item name
:
Unmanned submersible, acoustic communication system, and program
Joint applicant
:
KDDI Corporation, Thornton Blair, Kyushu Institute of Technology, National University Corporation
Public number
:
Touroku number 7033256
Filing date
:
2018-05-23
Inventor(s)
Takeshi Nakatani 
Takeshi Ohki
4 others