深海巡航探査機
「うらしま8000」
概要
深海巡航探査機「うらしま」は、船とケーブルがつながっておらず、事前に緯度経度、深度などを“シナリオ”として設定すると、潜航後はシナリオどおりに航行し、海底地形データ等を取得する自律型無人探査機(AUV)です。1998年から開発を進め、度々の改造やシステムの入れ替えを経て、深海調査に用いられるようになりました。海底付近から観測をおこなうため、船による調査に比べて高い解像度で海底地形や海底下構造データを取得することができます。
2022年から8000m級への改造を開始しました。そして、2025年、「うらしま8000」は水深8000mという超深海における航行試験に成功しました。今後、地震研究をはじめとした海溝域での詳細調査に用いられることが期待されます。
「うらしま8000」の航行
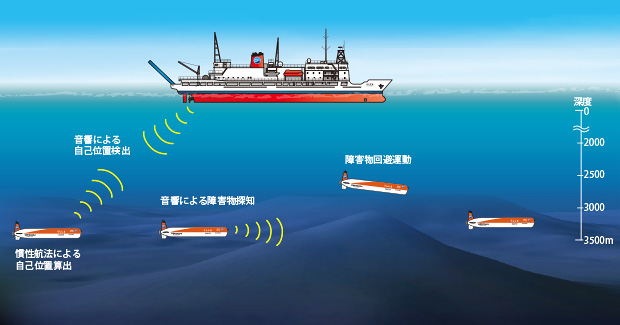
海中では電波が通じないため、陸上のあらゆる場所で使用されているGPSは使用できません。そのため、海底まで到達した後、船からの音響信号により機体の位置を更新します。出発地点で「うらしま8000」が正確な位置を把握した後、航行中は機体に搭載した慣性航法装置により、観測線のどの位置にいるかを自身で把握しながら航行します。
さらに、海底との距離(高度)を計測しながら航行しているため、 海底に起伏があった場合も海底面からの高度を一定に保ちながら航行することもできます。これは、機体底部に搭載したドップラー対地速度計からのセンサー値を「うらしま8000」が把握することにより、地形変化を素早くとらえ、それに応じた機体制御を行うためです。

慣性と音響の航法を交互に利用して航行する「うらしま8000」
「うらしま8000」の特長
高解像度海底地形及び海底下地質構造データの取得
例えば、海底面からの高度を120m程度に保った際には、およそ1m以下の解像度での海底観測が可能です。併せて、海底面下数十メートルまでの構造データを取得できます。

大型観測機器も搭載可能
「うらしま8000」のペイロードスペース(研究者がセンサー等の調査機器を持ち込めるスペース)は、機体の前部と後部に設けてあります。前部については容量約750リットル近くあり、採水装置や磁力計等の比較的大型の装置も搭載可能です。
高速音響通信/通信測位統合装置の搭載
機体と母船とは音響通信装置により情報のやり取りが可能です。
機体から母船には、定期的に電池残量、目標ポイント、深度(高度)などの情報が送られます。
母船から機体には、シナリオの変更、観測開始・中断及び設定の変更等の指示を送ることができます。
「うらしま8000」には、JAMSTECが開発した通信測位統合装置を搭載しています。この装置は、通信と測位を統合化することにより、高頻度で、安定した通信測位を実現します。また、通信には、「しんかい6500」などに搭載した高速音響通信と同じ手法を用いているため、高速な音響通信が可能です。これにより、画像化したソナーデータを定期的に機体から母船に送信することができるよう改造が進んでいます。これが実装されると海底調査中に特徴的なポイントが見つかった場合にすぐさまそのポイントの詳細調査が可能なります。
水中音響通信装置の詳細については、以下をご覧ください。
https://www.jamstec.go.jp/engd/j/uatrg.html
深海巡航探査機「うらしま8000」データ
一般配置図
主な経歴
- 2025年7月Topicsトピックス深海巡航探査機「うらしま8000」が深度8,000mへ到達
- 2025年7月伊豆・小笠原海溝にて潜航深度8015.8mを達成。
- 2022年4月潜航深度8,000mを目指し、改造に着手。
- 2016年1月「しんかい6500」と「うらしま」を同時搭載できるように「よこすか」を改造。インド洋にて潜航
- 2012年6月「うらしま」制御装置、推進装置及び慣性航法装置等を換装
- 2010年5月海洋理工学会業績賞受賞
- 2009年6月公募対象の探査機となる。マリアナトラフにて潜航
- 2006年12月Topicsトピックス「今年のロボット」大賞2006優秀賞受賞
- 2006年7月Press Releaseプレスリリース熊野トラフ泥火山微細地形構造調査
~海溝型巨大地震とメタンハイドレート資源研究への一助に期待~ - 2006年6月Press Releaseプレスリリース伊豆半島東方沖において地すべり痕確認-深海底微細地形の把握に成功-
- 2005年2月Press Releaseプレスリリース巡航探査機の世界新記録航続距離317kmを達成
- 2003年6月世界で初めて燃料電池で航続距離220kmを達成
- 2001年8月Press Releaseプレスリリース自律型無人機の世界最深記録および無線画像伝送の伝達距離を更新
- 2000年12月Press Releaseプレスリリース駿河湾内水深1,753mより水中カメラで撮影したカラー映像の音響画像伝送に成功し、自律型無人機として世界新記録を更新
- 1998年4月2005年実稼働を目指して深海巡航探査機「うらしま」の開発を開始