In July 2012, a mere 1 year and 4 months after the Tohoku Earthquake, and having faced a series of difficulties, the Japan Trench Fast Drilling Project (JFAST) expedition succeeded in placing a borehole observatory at the plate boundary fault that caused the earthquake. Nine months later, in April 2014, the remotely operated KAIKO 7000 II successfully recovered the observatory. Now, what exactly happened beneath the seafloor on the day of the earthquake? The mechanism behind massive earthquakes is being revealed by the analysis of previously retrieved geological samples from the fault and of temperature measurement data.
| Interviewee Assistant Professor Yasuyuki Kano Research Center for Earthquake Prediction, Disaster Prevention Research Institute, Kyoto University. |
Measuring frictional heat!
The Japan Trench Fast Drilling Project (JFAST) was set up in April 2012 with the aim of explaining the mechanism that generated the Tohoku Earthquake. One of the main objectives of this research project was to place high precision temperature sensors inside the borehole drilled by the CHIKYU, and measure the frictional heat generated by the earthquake still remaining in the fault.
Despite several difficulties, installation of the borehole observatory completed already in July 2012, which, a mere 1 year and 4 months after the earthquake, was exceptionally fast. A total of 55 temperature sensors were placed. They are attached in a row to a rope of over 820 m long, and placed inside the casing pipe, predominantly at the estimated depth of the fault. Once installed, they should continuingly measure the temperature inside the borehole over a number of months.
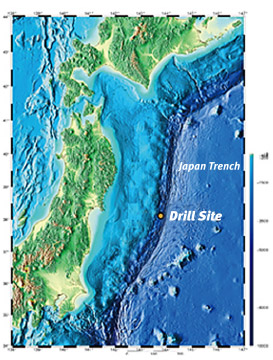
There is a reason behind the exceptionally fast implementation of this project. In the Tohoku Earthquake a large slip occurred in a shallow part of the plate boundary fault, which until then was not thought to slip a great deal in earthquakes. It is this large slip that is thought to be the cause of the massive tsunami. Why did this area, which we thought wouldn't slip, slip to such a great extent? To understand this mechanism we need to clarify how much stress this fault was under when the earthquake occurred.
It is not possible however to directly measure the stress that is applied to a fault, nor can it be determined from analyzing seismic waves. “It is one of the unsolved mysteries in seismology. Almost the only method that allows us to estimate this, is measuring frictional heat generated when a fault slips," tells Assistant Professor Yasuyuki Kano of Kyoto University’s Research Center for Earthquake Prediction at the Disaster Prevention Research Institute. He is part of the international joint research team driving the project to install the borehole observatory, and was also involved in the analysis and verification of temperature data. However, the passage of time as well as the fact that frictional heat is absorbed in the surrounding strata makes it difficult to measure years after an earthquake. “That’s the reason that we needed to measure the remaining frictional heat as soon as possible.”
One issue remained however: that of recovering these temperature sensors.
Sonar responded to the signal
Successful recovery of temperature sensors at last
In February 2013, deep-sea research vessel KAIREI set sail with the task of recovering the temperature sensors, carrying the remotely operated KAIKO 7000 II to perform the actual recovery. This is a deep sea probe boasting a maximum cruising depth of 7,000 m, consisting of a launcher which is connected with a cable to the support ship KAIREI and a vehicle that separates from the launcher to perform the surveys. It is remotely operated from the control room on board the KAIREI.
The temperature observatory in the borehole has a bracket on the top which sticks out onto the seafloor to enable its recovery. Using the vehicle’s manipulator a loop is hooked into the bracket, and the observatory is lifted by pulling it straight upwards.
This bracket is 6,800 m deep under water however. The range of vision of the underwater camera only stretches to the few meters reached by its light, and locating the borehole in the darkness using sonar is a virtually impossible task. After two submarine attempts the search eventually had to be abandoned.
A new attempt was made in April 2013, and this time, they couldn't fail. The borehole had to be located and the temperature sensors had to be retrieved at any cost. To ensure success, high precision acoustic positioning was used and, as part of a strategy to ascertain the topography of the seafloor in more detail, an investigative submarine mission was undertaken before the actual search.
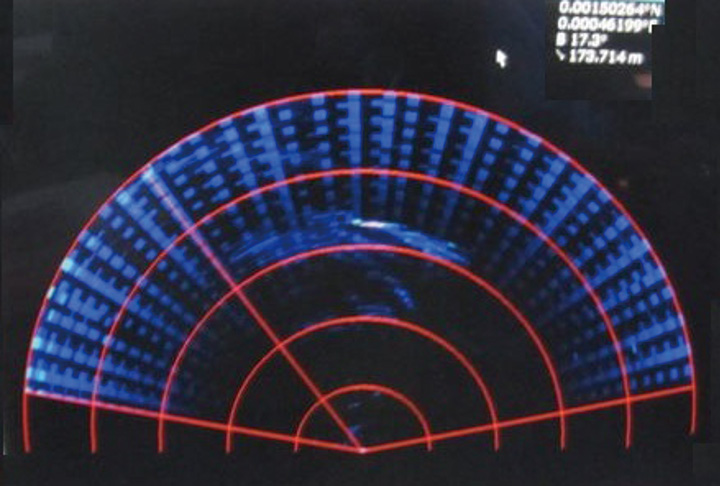
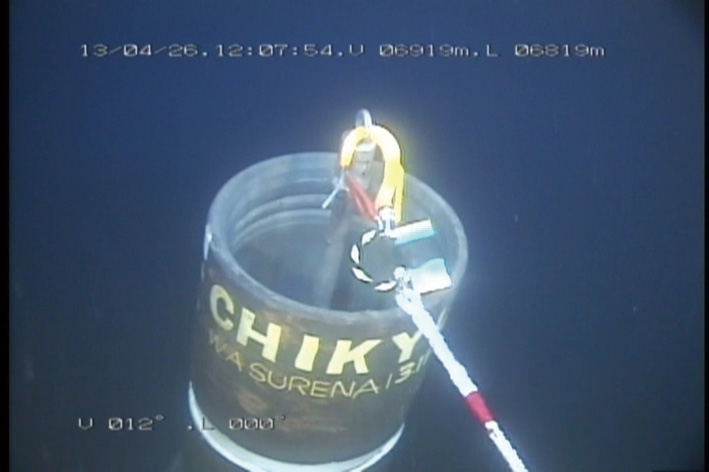
The search mission itself began on April 26. As the crew members looking at the monitor held their breath, soon something that seemed to indicate its presence appeared on the sonar. They had found the borehole, and for an instance there was relief on the faces of the crew members.
Skilfully operating the manipulator, a loop was carefully hooked into the retrieval bracket. As visual observation during the retrieval is impossible due to the darkness, a device that detects load (a load cell) is used for confirmation. This set-up registers the load of the observatory while being retrieved. An analog spring scale was also prepared in case the load cell failed.
While checking the pulling up operation on the bracket, and the observatory is lifted by pulling it straight upwards.
 |
 |
 |
This bracket is 6,800 m deep under water however. The range of vision of the underwater camera only stretches to the few meters reached by its light, and locating the borehole in the darkness using sonar is a virtually impossible task. After two submarine attempts the search eventually had to be abandoned.
A new attempt was made in April 2013, and this time, they couldn't fail. The borehole had to be located and the temperature sensors had to be retrieved at any cost. To ensure success, high precision acoustic positioning was used and, as part of a strategy to ascertain the topography of the seafloor in more detail, an investigative submarine mission was undertaken before the actual search.
The search mission itself began on April 26. As the crew members looking at the monitor held their breath, soon something that seemed to indicate its presence appeared on the sonar. They had found the borehole, and for an instance there was relief on the faces of the crew members.
Skilfully operating the manipulator, a loop was carefully hooked into the retrieval bracket. As visual observation during the retrieval is impossible due to the darkness, a device that detects load (a load cell) is used for confirmation. This set-up registers the load of the observatory while being retrieved. An analog spring scale was also prepared in case the load cell failed.
While checking the pulling up operation on the load cell's load display, the cable is raised and wound up. It is the first time that a rope of this length, 820 m, is drawn up. While cautiously adjusting the positions of the support ship and the KAIKO 7000 II to prevent the rope from snapping, the observatory is pulled up vertically. Masterly accomplishing a difficult operation that has never been done before, the temperature sensors were retrieved at last.
One of the temperature sensors that were pulled up had “Thank you for retrieving me!” written on it. A message of appreciation from the CHIKYU team that placed the sensors to the KAIKO team tasked with retrieving them, it caused laughter and applause on board ship. Kano, who sailed on this expedition, recalls thinking, “It made me realize once again that this success was due to the joined forces of the CHIKYU and KAIKO teams."