このプレスリリースには、ジュニア向け解説ページがあります。
2011年 2月 8日
独立行政法人海洋研究開発機構
最新の走行システムを装備した無人探査機試験機が複雑な海底での
走行試験に成功
〜国家基幹技術・次世代型深海探査技術の成果〜
1.概要
独立行政法人海洋研究開発機構(理事長 加藤 康宏、以下「JAMSTEC」という。)は、国家基幹技術・次世代型深海探査技術の開発の一環として研究開発を進めてきた無人探査機の新しい推進システムの海域試験を行い、これまで無人探査機の走行が困難であった砂地および岩礁において走行できることを確認しました。当機構では、今後、この技術を実機への応用に向けた技術開発を進め、我が国の海洋科学技術の向上に貢献していきます。
2.背景
無人探査機は地球環境問題、地殻変動等に必要な海底での観測装置の設置作業や海底試料の採取等での活用が期待されていますが、複雑な地形の海底面において様々な作業を実施するために機敏で柔軟性のある運動能力を発揮させる新しい推進装置の開発が課題となっており、海底ではクローラと言われる推進装置が有効であると考えられてきましたが、従来の装置では軟弱地層等で覆われている海底や傾斜や起伏の大きな海底においては十分に走行できませんでした。
3. 推進装置の開発
通常のクローラに新しい仕組み(フリッパー機構、スライド機構(※1))を加えた推進装置を開発し、無人探査機試験機に取り付けました。また海底で安定して機体を走行させるため、水による浮力や走行中に水から受ける外力を考慮し、スラスタ(機体に取り付けたプロペラ付き推進装置)を制御することで、走行機体の水中での重量や重心を変化させて姿勢を安定させました。
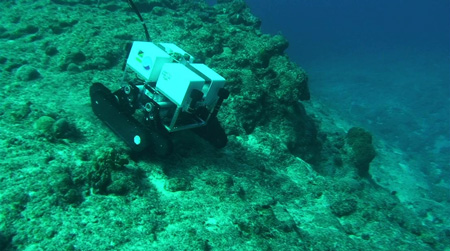
4. 試験結果
海底走行試験は平成22年9月から10月にかけて三重県御座沖にて実施した機能把握試験を経て、平成22年11月24日から11月28日にかけて沖縄県小浜島沖および同県黒島沖の砂地や30度以上の傾斜や起伏を伴った岩礁(図1、図2)からなる海域にて行いました。これらの新しい推進装置の走行性能を試すには適した海域においても、安全に走行できることを確認いたしました。
5. 今後の予定と展望
今後はより大きな機体の試験機を用いて実証試験を行い、走行性能の実証と改良を重ね、無人探査機への応用に向けて開発を進め、我が国の海洋科学技術の向上に貢献していきます。
また、今回の走行試験で有効性が確認された、プロペラ付き推進装置を用いて走行機体の水中での重量や重心を変化させる技術は、海底での地層試料等の採取の際に、機体が海底から受ける抵抗(反力)を安定的に受けるための機構にも応用ができるため、このシステムの改良を進めていくことで、従来の無人探査機や深海用のボーリングマシンでは行うことが出来なかった複雑地形でのピンポイントでの鉛直方向の地層試料の採取が可能となります。
今後もJAMSTECは海底を自在に走行し試料を採取する無人探査機の技術開発を進め、我が国の海底資源・エネルギー開発等に貢献していきます。
- ※1
- 通常のクローラの内側に4基のクローラを装備していて,そのクローラが各々360度回転可能(フリッパー式)。かつ、前後のクローラが次いで展開・格納可能(スライド機構)。これにより、複雑地形での走行特性の向上を図っている。

参考
特許出願実績
| 出願番号 | 共同出願人 | 名称 | 出願日 | |
|---|---|---|---|---|
| ※1 | 2010-207945 | 独立行政法人海洋研究開発機構/トピー工業株式会社 | クローラ型走行装置及び段差乗り越え方法 | 2010年9月16日 |
| ※2 | 2009-126012 | 独立行政法人海洋研究開発機構/トピー工業株式会社/広和株式会社/国立大学法人神戸大学 | 水中走行車両およびその制御方法 | 2009年5月26日 |
| ※3 | 2008-186046 | 独立行政法人海洋研究開発機構/公立大学法人大阪府立大学 | 水中走行車両 | 2008年7月17日 |
| ※4 | 2010-207944 | 独立行政法人海洋研究開発機構/トピー工業株式会社/広和株式会社 | クローラ装置およびクローラロボット | 2010年9月16日 |
お問い合わせ先:
- 独立行政法人海洋研究開発機構
(本研究について) - 海洋工学センター 先端技術研究プログラム
高性能無人探査機技術研究グループ
技術研究主任 井上 朝哉 TEL: 046-867-9383
- (国家基幹技術について)
- 経営企画室 研究企画統括 星野 利彦 TEL:046-867-9207
- (報道担当)
- 経営企画室 報道室長 中村 亘 TEL:046-867-9193