深海を探査するには、どんな方法があるのでしょうか。深海は真っ暗で強大な水圧のかかる世界。電波も使えないので、探査するにはたくさんの壁が立ちはだかっています。そんな深海での探査を可能にするのが、Autonomous Underwater Vehicle(AUV)と呼ばれる無人探査機です。AUVは電池を内蔵し、搭載したコンピュータに設定したルートに従って、自分で広い海を探査します。船上からコントロールしなくても自力で航行できる、頼れる探査機です。
そのAUVの機能をさらに向上させるために、研究者は新技術の開発に取り組んできました。その新技術とは、長持ちする深海用リチウムイオン電池、超小型の慣性航法装置、優れたコンピュータシステム、高機能の画像システムです。今回は、それらの新技術が、実際
の海で正確に動くか試験を行いました。
相模
湾で、新技術をMarine Robot Experimental-1(MR-X1)という名のAUVに搭載して試験を行ったところ…。見事に作動し、実験は大成功をおさめました!さらに、磁力計などを海底
に設置する作業にも成功しました。研究者は「さらに
発展させて、海底に機器を自動で設置・回収できる次世代の無人探査機につなげたい」と話しています。
無人探査機は大きく2種類に分けられます(図1)。まず、母船とケーブルでつなげて遠隔操作によって航行するRemotely Operated Vehicle(ROV)という遠隔操作型です。ROVは母船とケーブルでつながれていて、そのケーブルを介して電力や信号を受けとります。けれども、ケーブルがあるために、行動範囲が限られてしまいます。そこでかつやくするのが、もう1種類のAUVという自律型の探査機です。自律型とは、他からのコントロールを受けずに自力で航行するタイプという意味です。AUVは、電池を内蔵し、搭載したコンピュータに設定したルートに従
って航行するので、自力で広い範囲を探査できます。けれども、電池の量が決まっているので、活動時間が限られています。
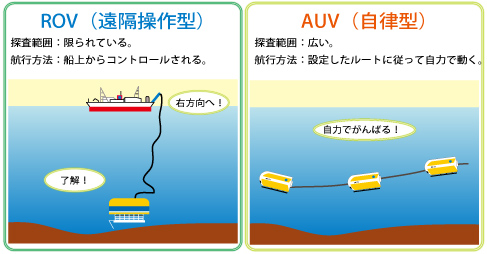
図1:無人探査機
そのAUVの機能をさらに高めるために、研究者は新技術の開発に取り組んできました。
それでは、4つの素晴らしい新技術についてお話ししましょう。
その1 長持ちする深海用リチウムイオン電池
探査機を動かすために重要なのは、電力源である電池です。深海は、水圧が高く水温も5℃以下と、電池の化学反応に適した環境とは言えません。また、運用時間や移動距離が増えると、必要な電力の量も増え、それにともなって電池のサイズや重さも大きくなってしまいます。運用とメンテナンスをできるだけ手軽にして、また海水の抵抗を減らすために、できるだけ軽くて小さい、けれど長持ちする電池が求められてきました。
そこで研究者が開発したのが、長持ちする深海用リチウムイオン電池です(写真1)。これまでもリチウムイオン電池は、小さいのに寿命が長く、温度が低い環境でも大丈夫なので、探査機に利用されてきました(解説 )。そのリチウムイオン電池の容量を、今回はなんと1.7倍も高めました。たとえば、これまで数時間だった探査時間が、なんと十数時間に延びたのです!
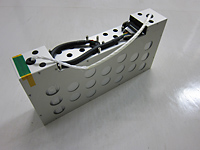
写真1:リチウムイオン電池
さらに、その電池を油漬均圧型の容器に入れました。油漬均圧型の容器とは、海水からリチウムイオン電池を守る優れものです。その秘密は、容器の中を満たす絶縁油という油(図2)。絶縁油は油なので海水とは混ざらず、電気も通しません。これで容器を満たすことによって、リチウムイオン電池は海水から隔離されます。さらに、絶縁油の存在によって、容器の中と外の圧力が均しくなり、深海の強大な水圧の影響も受けません。油漬均圧型容器があれば、耐圧のゴツイ容器を使う必要がないので、サイズも重さもおさえることができるのです。
小さいのに深海でも長時間安定して電気を供給できる、深海用リチウムイオン電池が誕生しました。
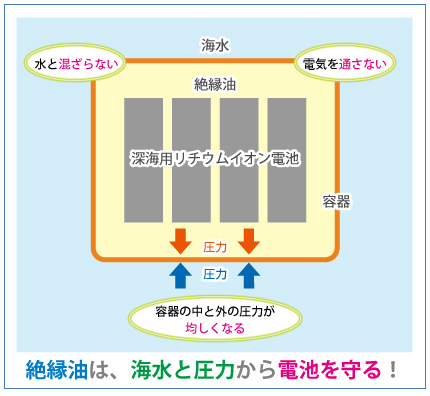
図2:リチウムイオン電池
(1つの容器の中に4つ入れます。)
その2 小型慣性航法装置
車に乗って目的地を目指す時は電波を使ってGPSが利用されるように、AUVも海の中を探査するには、自分で現在地などを計測しなければなりません。けれども、海中では電波はほとんど伝わらないので、GPSは使えません。代わりに慣性航法装置を使って、現在地やどれくらいのスピードでどれだけ走ったのかを計算したり、姿勢を調整したりします。今回は、国産宇宙ロケットにも使われている超小型のリングレーザージャイロというものを組みこみ、サイズも重さも、なんと半分まで小型軽量化しました。
その3 優れたコンピュータシステム
コンピュータは、AUVの
頭脳としての働きをします。今回は、コンピュータをいくつも用意して機能に応じて使いわけることで、それぞれのコンピュータが行う仕事の量を減らしました。また、各コンピュータを専用の通信経路でつなげて、あるコンピュータにトラブルが起きても他がおぎなえるようにしました。
その4 高機能の画像システム
海中の様子などをくわしく調べるには、高機能の画像システムが求められます。そこで今回は、2台の高性能デジタルカメラを利用しました(写真2)。1台による撮影では、対象物は平面的にしか見えません(図3)。ですが、2台で撮影すれば、対象物をちがう方向から同時に見れるので、その奥行きなどの立体的な情報を記録することができます。つまり、画像を撮影するだけで、距離や面積などまでわかるようになったのです。このシステムを応用すれば、深海生物や鉱物のサイズを測ったり、海中機器の問題を画像から確かめられるようになるでしょう。
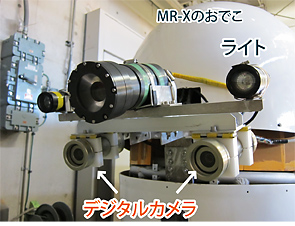
写真2:デジタルカメラ
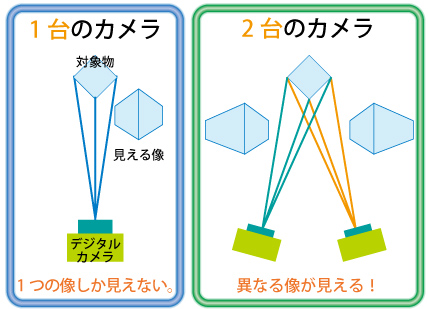
図3:デジタルカメラを2台使うと…
そして今回、これら4つの新技術が海で機能するかを確認する試験を行いました。

図4:実験を行った海域
4つの新技術をMR-X1という名のAUV(図5)に搭載して水深80〜1500mにしずめ、その動作を確認したところ…。
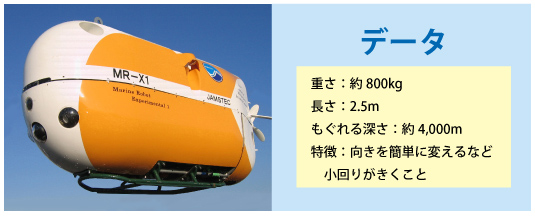
図5:作業型自律探査機「Marine Robot Experimental-1:MR-X1」
新技術は見事に機能し、実験は大成功!
さらに、自力で海底にはたと磁力計を設置する実験も行いました。その結果、MR-X1はちゃんと自力で、目的の位置の上まで航行して、海底までの距離を計算しながらゆっくりと降りて、はたと磁力計を設置、そして海面にもどってきたのです(図6)。こちらの実験も大成功!
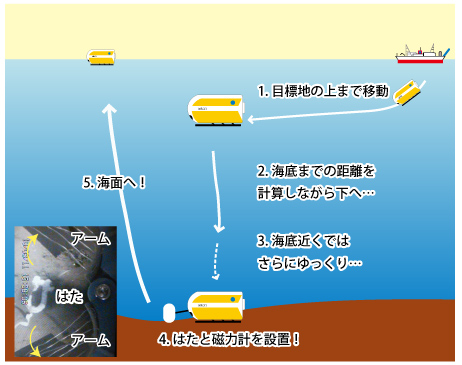
図6:自力での作業にチャレンジ
今回の試験によって、高い水圧の環境でも長時間安定して航行し、立体的に観測もできる画期的な新技術が実証されました。研究者は「今後は技術をさらに発展させて、機器を海底に設置・回収が自動でできる次世代の無人探査機につなげたい」と話しています。実現すれば、資源エネルギー開発や、海中にとけている地球温室効果ガスの調査にも大きく貢献するでしょう。それを目指して、研究者は今日もがんばります。
<< 一覧に戻る










