
海洋ロボティクスがめざす近未来技術
海洋観測の自動化および省人化を加速する技術開発
 研究船に頼らない海洋自動観測の実現
研究船に頼らない海洋自動観測の実現
有人研究船での観測は大変重要であり、現場海域での直接観測やサンプリング等、研究船にしかできない調査項目はたくさんあります。
一方、自律型無人探査機(AUV)の運用は有人研究船に搭載して展開しているため有人研究船のシップタイムに依存しています。
また着水揚収作業には多くの労力も有しており、AUV運用にコストがかかるのが現状です。
無人観測システムになるためにはまだ多くの課題があります。
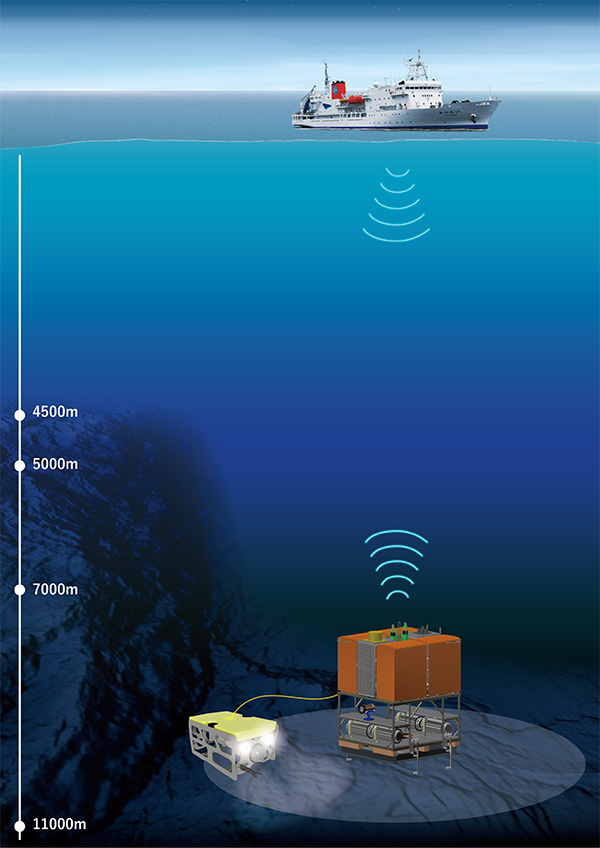
そこでAUV、ASV(Autonomous Surface Vehicle、洋上中継器)、海底ステーション等を用いて、沿岸から直接、調査海域にアクセスすることにより研究船に頼ることなく、省力化かつ低コストな観測を継続的に行うことで海洋の動的挙動解明に近づく、自動観測システムの実装を目指します。
新コンセプト フルデプスビークルシステムの検討
 ランダーステーション+小型ビークル方式
ランダーステーション+小型ビークル方式
大深度における研究を継続していくためには、大深度探査機が必要です。 一方で、従来から通信や電源供給用に必要であった重厚長大なアンビリカルケーブルは、長期的に必要な強度を保つことが困難です。
JAMSTECでは開発や運用のコストパフォーマンスに優れたフルデプス対応ビークルシステムを開発していきます。
ケーブルを使用せず、海底設置型ランダーステーション及び小型ビーグルを有効に活用するような新しいコンセプトビークルを検討しています。
目的試料の検出するための画像処理技術、長距離化や高速化が進む音響通信技術を適用していきます。
大深度対応自律型無人探査機(AUV)の開発
 日本海溝の地震発生帯
日本海溝の地震発生帯
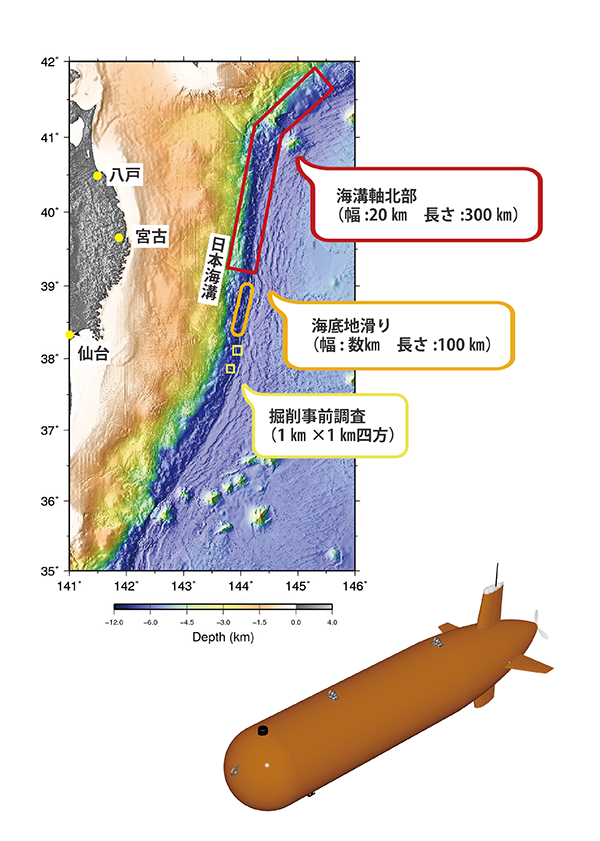
最深部が8,000mに達する日本海溝の地震発生帯調査を目的とした、自律型無人探査機(AUV)の開発を進めています。
AUVは詳細な海底地形図を作成すること、比較的広範囲のセンサーデータを収集するのに長けていることから地震部門の研究者からのニーズを受け、日本海溝の地震発生帯の調査を目的としたAUV開発を進めています。
今までにはない詳細な海底地形図を研究者に提供することにより、地震研究の推進をはじめ、極限生物研究、海洋物理研究および海底資源研究等の多くの研究分野に貢献できる機体を開発しています。
海洋ロボティクスのソフトウェアオープン化
 ソフトウェアオープン化
ソフトウェアオープン化
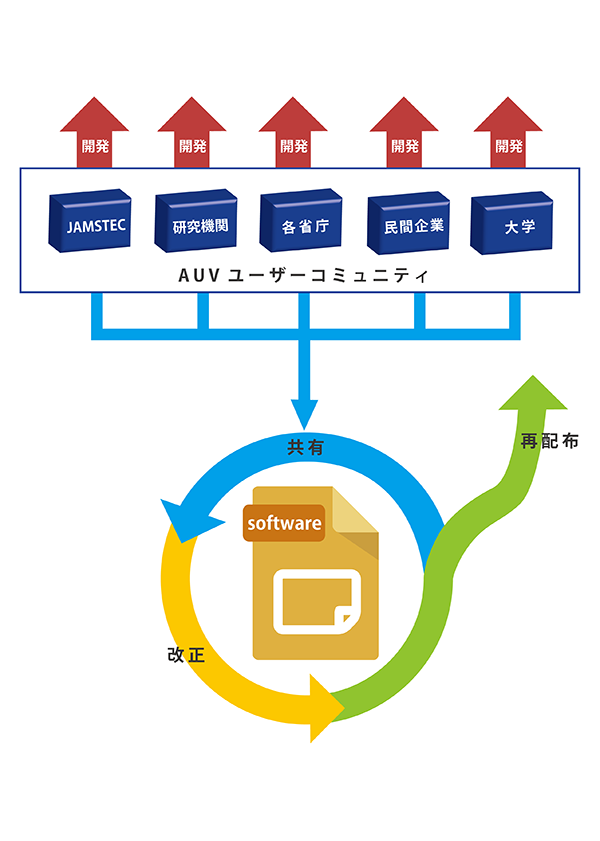
国内の大学・企業等がAUVの開発・導入をしやすい環境を構築するため、AUV開発・運用を行うAUVコミュニティにおいて協議のうえ、AUVの基本ソフトウエア等を新たに開発し、公開(オープン化)します。