プレスリリース
国立研究開発法人海洋研究開発機構
水中光無線通信を搭載した自律型無人探査機で
海底ステーションからデータを自動回収することに世界で初めて成功
1. 発表のポイント
- ◆
- 海底設置型観測装置の観測データを無人探査機が自動回収。
- ◆
- 自律型の無人探査機が光無線通信でデータを自動回収したのは世界初。
- ◆
- 多数の海底観測装置から、無人探査機が巡回してデータを回収(ハーベスティング)できるようになり、効率的な地震観測等、様々な海底観測への応用が期待される。
2. 概要
国立研究開発法人海洋研究開発機構(理事長 大和 裕幸)研究プラットフォーム運用開発部門 技術開発部の澤隆雄 主任研究員、中谷武志 グループリーダー代理、前田洋作 技術主任らは、水中光無線通信装置を用いることで海底に設置した観測システムから、自律型無人探査機(Autonomous Underwater Vehicle、以下「AUV」という)による観測データの自動回収に成功しました。
これまでの海底設置型観測装置では、観測データの回収のために装置本体を回収する必要があり、回収と再設置に手間とコストがかかり、また観測の不連続性によるデータ品質の低下が問題となっていました。
今回成功した海底観測装置からデータをAUVで自動回収する手法は「ハーベスティング(※1)」とも呼ばれ、水中では世界で初めて実証しました。今後はこの手法を用いた海底観測により観測コストの低減やデータ品質の向上が期待されます。
3. 背景
日本の広大な排他的経済水域(EEZ)のほとんどは深海であり、その探査には多数の自動観測装置が使われています。こうした海底設置型の観測装置のほとんどは電池で動作する自動装置です。しかし海水中では電波も光も届かないことから、一般的な無線通信は使えません。そのため観測データの回収には装置本体を回収するしか手段がなく、船舶で回収して再設置するコストが大きいことが課題の一つでした。
また、継続的な観測では、観測場所や設置状況などが同一で連続していることが望ましいのですが、装置を船舶で回収した後に洋上から自由落下させて再設置する従来のやり方では、観測条件の不連続性は避けることができず、こうしたことに起因するデータの質の低下が避けられませんでした。
これまで、本研究グループは、株式会社島津製作所らと共同で、水中において光無線通信を可能とする技術開発を行ってきました(2017年10月2日、2019年3月29日既報)。今回、これまで培った技術を活用し、深海底付近で自律航行が可能なAUVと、水中でWi-Fi接続を確立する水中光無線通信装置を用いることで、海底設置型の観測装置からデータのみを回収する手法(ハーベスティング)を試みました。
4. 成果
相模湾内の水深1,420mの深海底(図1)に、海底設置型観測システム「FFC11K」(図2)を設置し、これに向けてAUV「AUV-NEXT」(図3)を自律航行にて接近させ、これらに搭載した光通信装置によるデータ回収を試みました(図4)。回収するデータは、FFC11Kに搭載している4Kカメラによって観測した深海底の映像を対象にしました。巡行型のAUVは海底へ接近することが苦手であり、また低速で運動性能が低下することから、AUVは高度と速度を保ったままFFC11Kの上方を通過します。このAUVが通過するわずかな時間(約10秒間)でも光通信を用いておよそ130KBの深海画像データ(図5)を複数回収することに成功しました。これは、世界で初めての事例です。
なお、光無線通信の状況はAUVから母船「よこすか」へ音響通信で送信され、オペレーターが常時確認していました。また、これら一連の作業は、AUVに目標点への接近を指示すること以外はすべて自動で行われました。
5. 今後の展望
今後、深海底観測にこの手法を導入することができれば、海底ケーブルがない海域でも船舶による装置回収を必要とせず、任意のタイミングでAUVによる自動データ回収ならびに、同じ場所での継続観測が可能となります。
これにより、水圧計等を用いた海底地殻変動観測など、高頻度なデータ回収が望ましい研究分野への貢献が期待できます。
また、今回の成功により、最終的な目標である、基地岸壁から出航したAUVが海底の多数の観測装置を自動で巡回し、観測データのみを回収して再び基地に戻るという「海底観測の自動化」に向けて大きく前進しました。
今後は通信装置の改修やデータ回収手法の改良を進めることで、より効率の良いデータ回収手法について検討を進め、更にシステムの高度化を目指していく予定です。
【補足説明】
- ※1
- ハーベスティング
一般にはよく実った果実などを収穫する事を意味し、近年は蓄積したデータやエネルギーの回収作業などを指しても使われる。
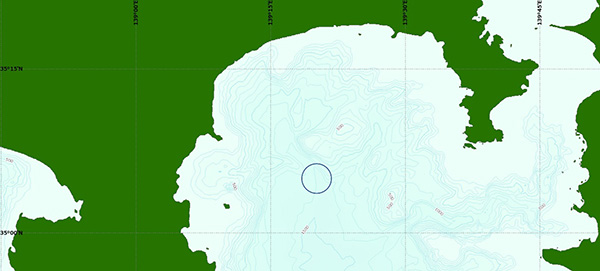
図1 試験場所

図2 大深度用海底設置型観測システム「FFC11K」
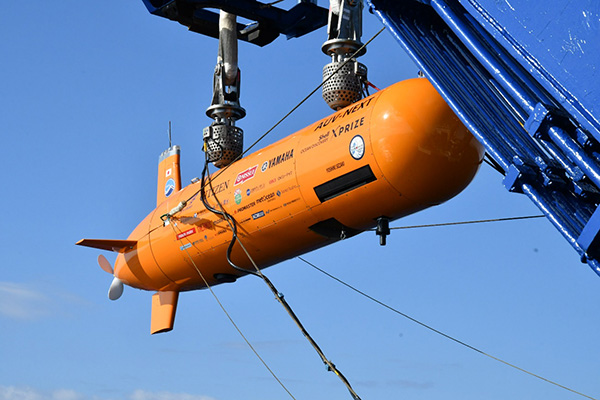
図3 自律型無人探査機「AUV-NEXT」
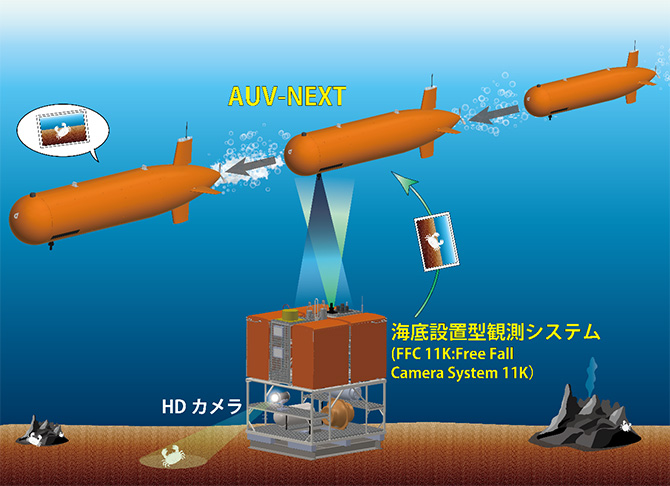
図4 データ回収作業の模式図

図5 FFC11Kで撮影し、AUV-NEXTが回収した海底画像例
海底ステーションからデータを自動回収することに世界で初めて成功
- 国立研究開発法人海洋研究開発機構
- (本研究について)
- 研究プラットフォーム運用開発部門 主任研究員 澤 隆雄
- (報道担当)
- 海洋科学技術戦略部 報道室