
長期定域観測用水中グライダーを開発
1. 概要
海洋研究開発機構では、長期に渡って一定海域に滞在し、水深3,000m までの海底と海面の間を定期的に往復しながら、水温、塩分、水圧を観測する長期定域観測用水中グライダーの開発を進めております。
現在開発中の水中グライダー(図1)は、長さ 2.5m、幅 1m、高さ 0.5m、空中重量 150kg です。浮力エンジンにより、耐圧容器外に取り付けたブラダと呼ばれるゴム袋に油を出し入れすることにより浮力を調整し、下降と上昇を繰り返します。同時に翼に発生する揚力を利用して、海中を滑走します。空を飛ぶグライダーと同じように、スラスタ(プロペラ)などの推進器を持たないため、少ない消費電力で水中を滑走することができ、長期に渡って観測を行うことが可能になります。この開発により新たな海洋観測ツールの提供が期待されるところです。
2. 背景
現在、海洋観測では、主にアルゴフロートやブイシステム、観測船を用いて行われています。このうち、アルゴフロートは、図2に示すように、水深2,000m の海中と海面の間を約10日に一度の割合で往復し、水温・塩分・水圧を観測します。海面浮上時にはGPSで測位するとともに、通信衛星経由でデータを伝送しながら、3~4年に渡る長期観測を行います。しかし、アルゴフロートは海水とともに漂流するため、観測データが必要な海域に長期間留まることが困難です。また、ブイシステムは定点での長期間にわたる観測が可能ですが、設置と維持・運用のため、大型の観測船による定期的な航海を必要とするなどの制約があり、その設置数は限定されています。
近年、新しい観測プラットフォームとして水中グライダーが注目されるようになりました。現在すでに欧米を中心に主に沿岸域の海洋観測に利用されています。しかし、これら既存の水中グライダーには、1年以上に渡って長期観測を行う機能がありません。
そこで、海洋研究開発機構は、この水中グライダーを応用し、数年に渡って一定の海域に留まり、海底から海面までの環境変動を準リアルタイムで観測する長期定域観測用水中グライダーを提案し、開発に着手いたしました。
3. オペレーションのイメージ
図3はオペレーションのイメージを表したものです。通常の水中グライダーと異なり、この長期定域観測用水中グライダーは海底に着底し、一定期間スリープすることにより、観測期間を延長します。水面浮上時にはGPSで測位し、イリジウム経由でデータを伝送します。目標の海域から流された場合には、海中を滑走して目標位置に戻ります。このようにして、一定海域内での海底から海面までの長期観測を実現します。
4. 現状と今後の計画
これまでに水槽を使った滑走試験と、実海域での下降・浮上試験を実施し、水深500mまでの潜航・浮上が可能であることなどを確認しています。現在、目標位置に向けた滑走を自律的に行うためのソフトウエアの開発を進めるとともに、海底への着底制御に用いるための超音波高度計の開発を進めています。本年度中には、これらの基本的機能を検証するための実験を開始する予定です。
また、これらの開発と並行してキーデバイスである浮力エンジンの小型・軽量化とセラミックスを用いた軽量・高強度耐圧容器の研究・開発も進めており、これにより全体システムの小型軽量化と水深6,000mまで対応できることを目指しています。
なお、本研究の一部はJSPS 科研費24246146 の助成を受けています。また運動制御に関しては、九州大学応用力学研究所と共同で研究開発を進めています。

図1 長期定域観測用水中グライダーの外観
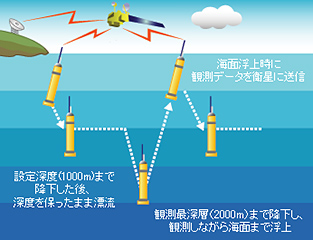
図2 アルゴフロートのオペレーションイメージ
(「JAPAN Argo - アルゴの仕組み」 より)
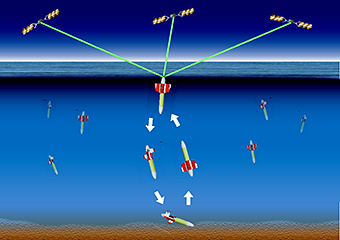
図3 長期定域観測用水中グライダーの
オペレーションのイメージ