
The uROV PICASSO-1 (Plankton Investigatory Collaborating Autonomous Survey System Operon-1)
The PICASSO-1 is the primary vehicle in a system of small remotely-operated vehicles developed to survey plankton and other deep sea organisms at a range of sizes using imaging tools such as a high definition television camera, an underwater microscope called the Autonomous Visual Plankton Recorder (AVPR) and metal halide and red/white LED illumination.It can be deployed from a chartered diving boat so is quite flexible in its survey operations.

- Weight in air
- 200kg
- Size
- 2m(L)×0.8m (W)×0.8m (H)
- Maximum depth
- 1,000 m
- Power source
- lithium ion batteries
- Operational modes
- UROV
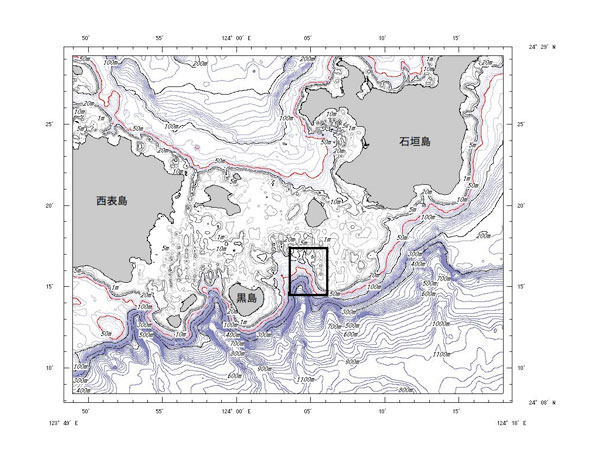
The Sekisei Lagoon where the present survey was carried out is situated between Ishigaki Island and Iriomote Island.

The mothership “Seagull”, a chartered dive boat for SCUBA diving.

PICASSO and all the associated equipment were shipped to Ishigaki Island in this shipping container.

Preparation for diving operations. The PICASSO system is being developed through an ongoing collaboration between marine biologists and engineering researchers.

Testing of the newly-developed deployment and retrieval system for PICASSO-1. This is the first time PICASSO has been deployed from a ship without an A-frame, davit or crane. The aft hydraulic platform was slowly lowered while letting out the ropes to give PICASSO-1 a soft landing into the ocean. With this system it has become possible to deploy PICASSO from any ship around the world with an aft hydraulic platform. Surveys off the Great Barrier Reef in Australia are planned for next year.
After arrival at the dive site we run through a pre-dive checklist of 141 different items to ensure smooth operations.

Everybody needs to pull their weight to get PICASSO in the water.

Start the dive!
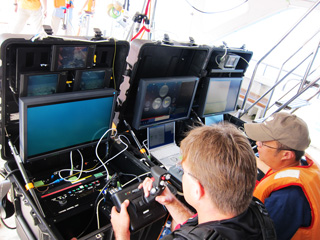
PICASSO is “driven” using these three monitors. On the left is the realtime HDTV video feed, central is the screen showing PICASSO’s vital statistics such as thruster angle, and the direction in which the vehicle is pointing, and on the right is the monitor showing the GPS position of the ship and acoustically-derived vehicle location.
A cameraman records the movements of PICASSO underwater.

“Hey, check that out! What great video!” the researchers exclaim as they watch the monitors. On the left is the PICASSO Project Leader Dhugal Lindsay. On the right is Dr. Jun Nishikawa from the Atmosphere and Ocean Research Institute of the University of Tokyo.

Video taken by the high definition television camera on board the PICASSO.
The lights of PICASSO are positioned such to give depth to the images and illuminate the edges of objects to maximum definition.

At a depth of 50 m we were able to observe table coral and reef fish while undisturbed, without being pulled mercilessly by a tether taut to the mother ship.
The present survey was conducted over a period of 11 days. The first week was used to set the ship up for operations, test the newly-developed deployment/retrieval system, iron out wrinkles in the newly-developed shipside operations consoles, and hone the skills of the researchers involved in the operations. Three dives were made in the last two days that were entirely devoted to collecting biological data. It was found that a very highly developed thermocline was present at around 100 m depth and that concentrations of marine snow were extremely high just below this thermocline. Data on water temperature, salinity, dissolved oxygen concentration and other environmental parameters were collected and these will be correlated to the presence or absence of different reef fish species to characterize their preferences for different environments.

The present survey was conducted by PICASSO Team members from JAMSTEC, the Atmosphere and Ocean Research Institute (AORI) of the University of Tokyo, Osaka University, Kowa Inc. and Takizawa Manufacturing Corp.

Footage for a television program was also taken by a TV crew.
On 7 November the present survey will be introduced on Asahi TV program “The miracles of Earth”.
Between 20-30 September 2010 the uROV (untethered remotely-operated vehicle) PICASSO did its first survey of the biota off the islands of the Ryukyu Archipelago. The main survey point was between 100-200 m depth off the island of Ishigaki. This depth range is too deep for SCUBA divers to survey without special equipment and too shallow for the larger ROVs and crewed submersibles that JAMSTEC owns to operate in an thus is a largely unknown area. PICASSO can survey to depths of 1000 m but is also very good at maneuvering freely and unhindered through the water as proved during the present voyage.
The waters off the Ryukyu Archipelago are highly diverse with ecosystems ranging from the coral reefs of the shallow waters to chemosynthesis-driven ecosystems such as those associated with methane cold seeps and hydrogen sulphide rich hydrothermal vents.
Depths from 100~200 m lie between the main range for the highly diverse shallow water coral ecosystems and the highly diverse deep sea ecosystems and as such are of great interest to researchers studying biodiversity.
During the present survey researchers used the broadcast quality high-definition television camera to videotape a variety of organisms living at these depths.
Here we introduce the latest voyage and the results gained from it.