Technologies for Land & Underwater Communication
Underwater Acoustic Communication and Positioning
Since conventional radio wave signals cannot propagate any significant distance through water, JAMSTEC is developing underwater communication and positioning technology utilizing sound waves. Our research focuses on increasing the data rate and accuracy of underwater acoustic communication and positioning essential for operating various underwater platforms in deep-sea exploration. Our work also includes high-rate MIMO communication using time reversal in a multipath environment in the horizontal direction.
High-speed acoustic communication with deep-sea exploration system
High-speed acoustic communication devices have been developed for acoustic communication with "Shinkai 6500" and FF11K (a lander system capable of exploring to a depth of 11,000 m). We have achieved a communication speed of over 600 kbps km, which is more than 10 times the performance of existing communication devices. Notably, distance x speed can be used for a performance metrics because the speed of underwater acoustic communication is approximately inversely proportional to the distance.
The first device was developed in-house in 2017, then it has been implemented on the Shinkai 6500 and FF11K since 2018. They have been used as a device to transfer observation data and deep-sea camera images. We also succeeded in remotely controlling FF11K, which was installed at a depth of 9,200m, using acoustic communication from a surface vessel.

Development of a "multi-user communication and positioning integrated device" that integrates acoustic communication and positioning
- Long guard time are needed to avoid the interference between communication and positioning signal.
- Manual triggering adjustment for signal transmission is required depending on the source-receiver geometry.
- In the case of multiple user operations, the communication/positioning interval should be extended, and the operation becomes more complex.
- Since positioning is performed using communication signals, the interval of communication/positioning is reduced.
- Because the timing of communication is controlled by positioning result, there is no overlap.
- The time is controlled by CSAC (chip scale atomic clock), and no positioning interrogation signal is required.
We have developed a device that integrates communication and positioning for high functionality of the communication device with the deep-sea exploration.
Traditionally, acoustic communication and acoustic positioning equipment units were implemented as separate devices and used without interlocking. Therefore, long intervals were required to prevent communication and positioning from interfering, and communication and positioning could only be performed at a low frequency. Furthermore, communication and positioning for multiple users require longer intervals and more complex operations.
To solve this problem, we devised and put into practical use a method that integrates communication and positioning signal processing. This enables high-frequency and stable communication/positioning, as well as communication/positioning with a large number of users.
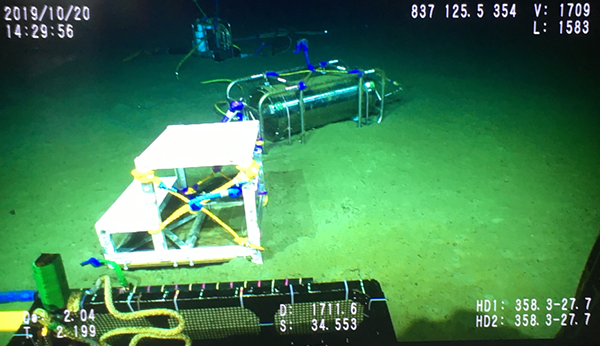
In 2019, we successfully conducted an experimental demonstration of simultaneous operation of four AUVs using this device. It is also planned to be installed on the Shinkai 6500 and the AUV Urashima 8000, which is currently under construction, for actual operation.
Long-range, high-speed MIMO acoustic communication by time reversal processing
In long-range horizontal communications in the ocean, numerous multipath waves resulting from reflections and refractions are received over long durations. The characteristics of the propagation path including such strong multipath interference, also known as inter-symbol interference, must be compensated for; this processing is called channel equalization. Meanwhile, MIMO communication is a method to improve data rates by simultaneously transmitting different signals from multiple transmitters and known as spatial multiplexing communication. For this purpose, overlapping received signals have to be separated into individual transmitter signals; this procedure is known as inter-channel interference elimination.
In this research, at-sea experiments for MIMO communications have been carried out to demonstrate the performance of an adaptive time-reversal DFE method, which is a demodulation method combined with an advanced version of time reversal processing.
Consequently, it was shown that this method has better spatial multiplexing separation performance than that of conventional demodulation methods, including MMSE-OFDM, which enables MIMO communications with higher data rates and longer ranges. In this research, 600 kbps-km was achieved in a horizontal multipath environment, which is more than 10 times higher than that of the past widely accepted limitation value.
Acoustic communication in a multipath environment with a high-speed moving vehicle
- A highly severe doubly selective channel with multipath fading and Doppler shifts
- The Doppler shifts of multipath signals differ from each other.
- The received signal is significantly distorted with fast movement.
The impact of movement on underwater acoustic communication through the Doppler shifts is 4 to 5 orders of magnitude greater than those in aerial radio communication. This is because the propagation speed of sound waves in water (1,500 m/s) is extremely slow, only 1/200,000 of the propagation speed of radio waves in air. Considering acoustical communication with a vehicle moving at 10 knots (5 m/s) underwater, the impact would be equivalent to that caused by a movement speed of over Mach 3,000 in aerial radio communication. This is 150 times the speed of the first cosmic velocity.
Furthermore, in the case of horizontal communication, the impact of multipath fading adds to the challenge, making the channel characteristics extremely difficult (highly severe doubly selective).
In this study, we conducted communication experiments between vehicles moving at a relative speed of 10 knots in a shallow sea multipath-rich environment and achieved a communication speed of over 40 kbps.
Optical and Electromagnetic Technologies
3D Underwater Laser Scanner Development
JAMSTEC uses, with great success, our in-house 3D underwater laser ranging technology for seafloor imaging. Our research team currently develops a portable field calibration and ranging device for submarine water pressure gauges that will be used as the latest technology demonstrator.
 Laser ranging technology around the target.
Laser ranging technology around the target.
 Target (step pedestal) appearance.
Target (step pedestal) appearance.
 External view of the laser scanner.
External view of the laser scanner.