陸上と海中の通信をささえる基盤技術
水中音響通信・測位に関する研究
電波の届かない海中では通信や測位に音波が用いられます。
深海探査の各種海中プラットフォームに不可欠な海中の音響通信・測位について、その高速度化・高精度化に関する研究開発を行っています。
また、水平方向のマルチパス環境におけるTime Reversalによる高速MIMO通信の研究を進めています。
深海探査機との高速音響通信
「しんかい6500」やFF11K(深度11,000mまで探査可能なランダーシステム)との音響通信のため開発した装置です。距離×速度の指標で、既存の通信装置の10倍以上の性能となる600kbps·km以上の通信速度を達成しました(水中の音響通信の速度は、距離におおよそ反比例します。そのため、距離×速度の指標で性能が比較されます)。
2017年度にインハウスで開発、2018年より「しんかい6500」やFF11Kに実装され、観測データや画像を転送するための装置として運用されています。また、深度9,200mに設置したFF11Kを音響通信で遠隔操作することにも成功しています。
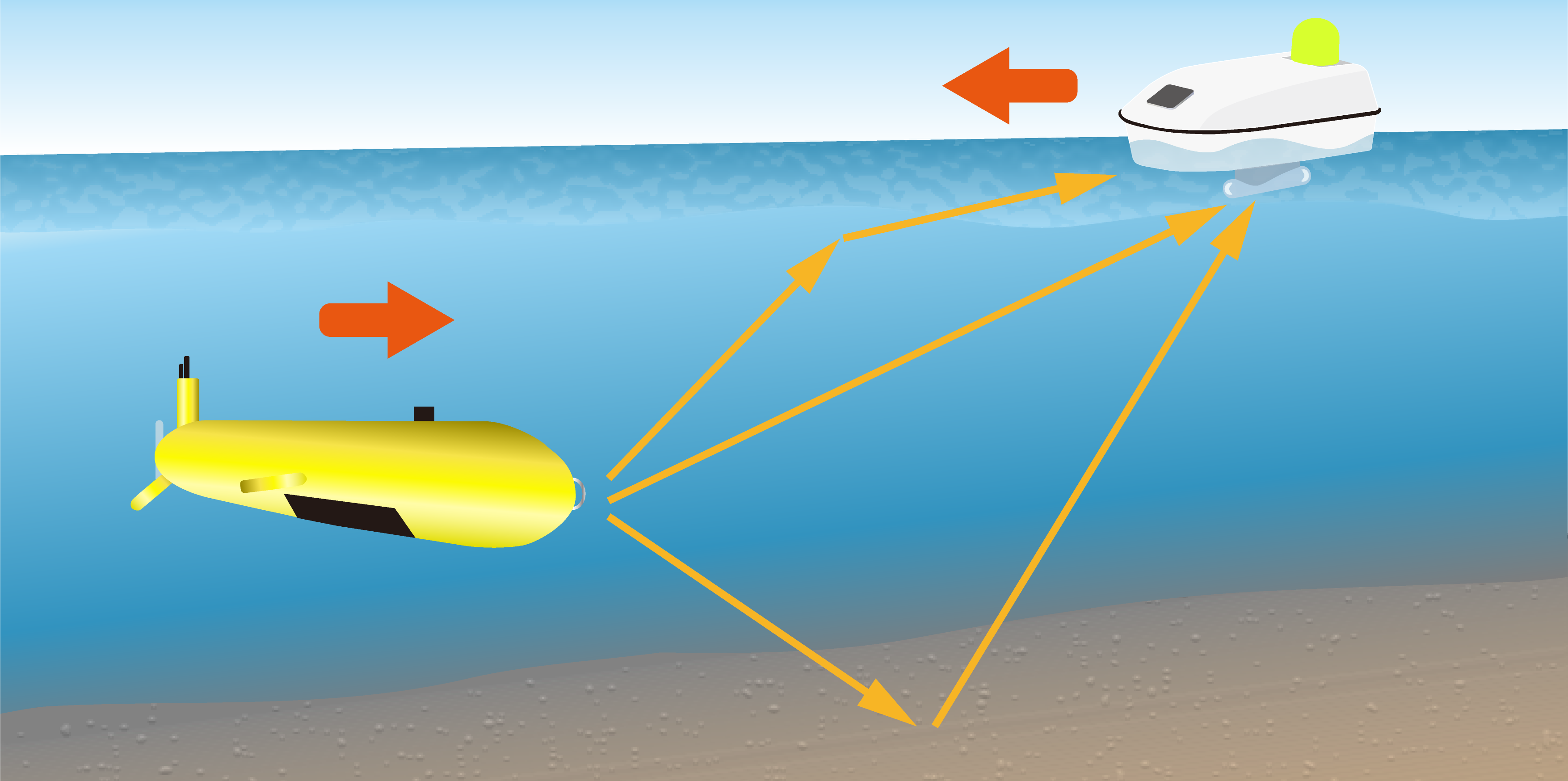
音響通信と測位を統合化した「マルチユーザ通信測位統合装置」の開発
- 通信と測位が重ならないようにするため頻度が
低い。 - 位置関係に応じて調整が必要。
- 複数機運用の場合、さらに頻度が低下し、
複雑になる。
- 通信の信号を使って測位も行うため通信と測位の
頻度が上がる。 - 測位によって通信のタイミングが
制御されているため、重ならない。 - CSAC(チップスケールの原子時計)により時刻が
制御されており、測位の質問信号も不要。
深海探査機との通信装置をさらに高機能化し、通信と測位を統合化した装置を開発しました。
従来、音響通信装置と音響測位装置は、別々の装置として装備され、連動せずに用いられていました。そのため、通信と測位が干渉しないように、長いインターバルが必要となり、低い頻度での通信測位しかできませんでした。また、複数の探査機と通信測位をするためには、さらに長いインターバルと複雑な操作が必要となります。
この問題を解消するため、通信と測位の信号処理を統合化した方法を考案し、実用化しました。これにより、高頻度で安定した通信測位が可能となり、また、多数の探査機との通信測位も可能となりました。
2019年には、この装置を用いて4機のAUVの同時運用の実証試験に成功しています。また、「しんかい6500」や建造中のAUV「うらしま8000」などに搭載され、実運用される予定です。
Time reversalによる長距離高速MIMO音響通信の研究
海中において、水平方向に長距離の通信をしようとする場合、反射や屈折による多数のマルチパス波が、長い時間にわたって受信されます。よって、このような強いマルチパス干渉(シンボル間干渉)を含んだ伝搬路の特性を補償する必要があります(チャネル等化)。また、MIMO通信は、複数の送波器から異なる信号を同時に発信する(空間多重通信)ことで、通信速度を向上させようとする方法ですが、そのためには、重なって受信される信号を分離する必要があります(チャネル間干渉の除去)。
この研究では、time reversal(時間反転による信号処理)を発展させたadaptive time-reversal DFEという方法をMIMO通信に適用し、実海域での実証試験を進めました。その結果、従来のMMSE-OFDMなどよりも、空間多重の分離性能が優れており、より高速・長距離のMIMO通信が可能となることが示されました。実証試験の結果では、水平方向のマルチパス環境において、先行の研究事例の10倍以上となる600kbps·kmを達成することができました。
高速で移動する探査機とのマルチパス環境における音響通信
- マルチパス波とドップラーシフトが加わる非常に厳しい二重選択性伝搬路
- ドップラーシフトは、マルチパスごとに異なる。
- 速い移動に応じて、受信信号は大きく変化する。
水中音響通信における移動の影響(ドップラーシフト)は、空中の電波通信に比較して、4~5桁以上の影響があります。これは、水中の音波の伝搬速度(1,500m/s)が、空中の電波の伝搬速度の20万分の一と非常に遅いためです。仮に、10ノット(5m/s)で移動するビークルとの通信を考えた場合、空中の電波通信に換算すると、マッハ3,000以上の移動速度に相当します。これは第1宇宙速度の150倍です。
さらに、水平方向の通信の場合、マルチパス波の影響が加わるため、通信を行うには非常に難しい伝搬路特性となります(非常に厳しい二重選択性)。
この研究では、浅海域のマルチパス環境において、相対速度10ノットで移動する探査機間での通信実験を行い、40kbps以上の通信速度を達成することができました。
光・電磁波技術〔3Dレーザースキャナ Underwater 3D Laser Scanner (U3LS)〕に関する研究
海中におけるレーザー測距技術を用いて海底を三次元可視化するとともに、海底設置型水圧計に対する現場校正測距装置として、移動体へ搭載可能なシステムを構築し、その実用性および実装実現性を示す研究を行っています。
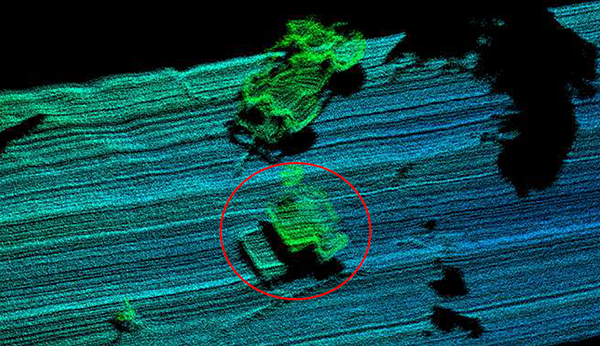 レーザー測距技術によるターゲット周辺の3Dスキャニング画像
レーザー測距技術によるターゲット周辺の3Dスキャニング画像
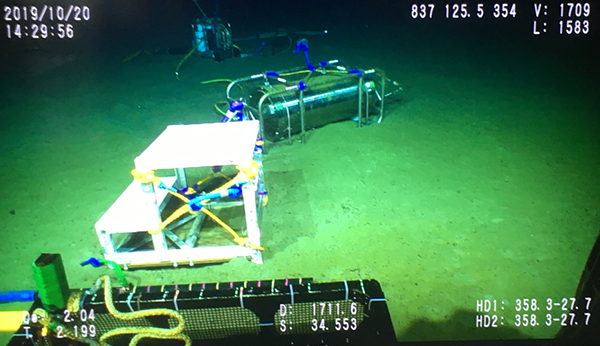 ターゲット(ステップ台座)外観
ターゲット(ステップ台座)外観
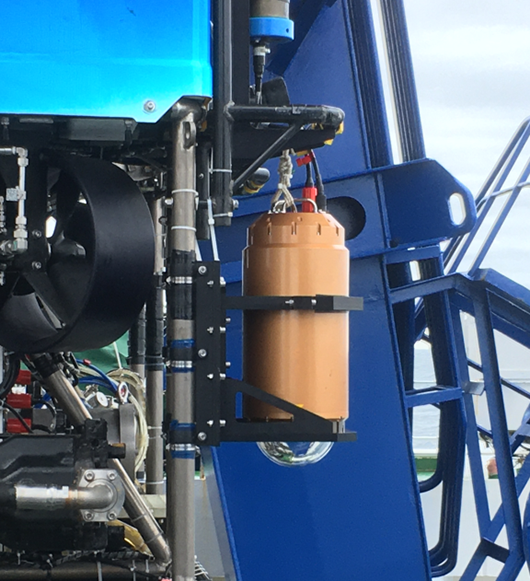 レーザースキャナ外観
レーザースキャナ外観