プレスリリース
このプレスリリースには、ジュニア向け解説ページがあります。
2013年 10月 17日
独立行政法人海洋研究開発機構
独立行政法人情報通信研究機構
超高速インターネット衛星を用いた陸上からの無人探査機遠隔操作
(テレオペレーション)に成功
- 海のブロードバンド化を見据える新たな技術展開へ -
1.概要
独立行政法人海洋研究開発機構(理事長 平 朝彦、以下「JAMSTEC」という。)の石橋正二郎技術研究副主幹らのグループは、独立行政法人情報通信研究機構(理事長 坂内正夫、以下「NICT」という。)と共同で、高速衛星通信を用いた陸上からの無人探査機遠隔操作(テレオペレーション)試験に世界で初めて成功しました。
本試験では、超高速インターネット衛星「きずな」(WINDS)が提供する衛星通信リンクを用いて、陸上(JAMSTEC横須賀本部)から相模湾初島沖水深約130mに潜航中の無人探査機「おとひめ」をテレオペレーションするとともに、「おとひめ」が撮影する高精細な深海映像や各観測機器・センサの計測結果を、リアルタイムに陸上へ送信することが実現されました。
この成果は、衛星を介したブロードバンド(高速・大容量の通信回線や通信環境)技術に対する新たな可能性をもたらすものであり、"海のブロードバンド化"にとって重要な一歩となります。この成果を更に進捗させることで、海底資源探査や海底地形調査の高度化、効率化に今後大きく貢献することが期待されます。
2.背景
海洋観測で得られるデータは、資源探査や環境・気候変動、地震・津波災害など、我が国が抱える様々な課題の解決に必要なものであり、その観測精度を向上させ、観測範囲を拡大することにより、大規模かつリアルタイムな情報収集を行うとともに、その情報を効果的に活用することが望まれています。このためには、大容量のデータを高速で通信する海洋ネットワークが必要となりますが、現状では、汎用性が低く伝送速度も限定的なブロードバンドサービスしか提供されていません。
そこでJAMSTECはNICTと共同で、宇宙(衛星)を介した海上から深海にまで至るリアルタイムな“海のブロードバンド化”について検討を進めてきました。今回の無人探査機テレオペレーション試験は、こうした取組の一環となります。これまでの無人探査機運用は、探査機を目的の海域まで支援母船で運搬し、研究者やオペレータも乗船して現場に赴き、場合によっては海上に長期間滞在するという、非常に時間と人手がかかるものです。また、無人探査機で得られたデータの分析や解析も、船上では詳細に行えないため、基本的には下船後となってしまい、リアルタイムな対応が難しく、観測現場では、こうした現状の改善を強く望んできました。
3.成果
JAMSTECとNICTの共同研究チームは、テレオペレーションに必要となる「きずな」が提供する超高速の衛星通信リンクを船上に確立するために、アンテナの高精度な初期捕捉及び衛星トラッキング(追尾)システムを開発する一方で、負荷分散や自己復旧能力を持つ新開発のネットワーク技術にて構成された「おとひめ」制御システムを開発しました。これまで、陸上において各システムの通信試験、結合試験を実施するとともに、各機能とシステム構成について検討を重ね、このたび、実機を用いた海域試験において、世界で初めて高速衛星通信による無人探査機テレオペレーションに成功しました。
本試験は、本年10月6日に「きずな」の高利得アンテナ(アンテナの受信能力が高いので、送信電力が極めて小さい地上局からの信号も受信できる)を利用して、JAMSETC横須賀本部(神奈川県横須賀市)と相模湾初島沖を航行するJAMSTEC所有の海洋調査船「かいよう」とを相互通信することにより、海中を潜航中の「おとひめ」のテレオペレーションを実施したものです。
JAMSTEC横須賀本部には「きずな」との通信を行う大型車載地球局と「おとひめ」の陸上制御コンソール(コンピュータを操作するために使う入出力装置のセット)を設置しました。一方、「かいよう」船上には衛星トラッキングシステムを備える船舶搭載局と「おとひめ」の船上制御コンソールを設置しました。「おとひめ」は「かいよう」と直径1mmの光ファイバケーブルで連結されており、光通信にて船上制御コンソールに「おとひめ」に関する全ての情報が送信されます。船上制御コンソールでは、受信した情報を船上の船舶搭載局に配信し、「きずな」を経由してJAMSTEC横須賀本部に送信され、大型車載地球局がこれを受信することで、陸上制御コンソールにおいて当該情報が展開されます。陸上制御コンソールでは、オペレータがこれをモニタリングしながら、同経路にて「おとひめ」への制御指令を発信することで「おとひめ」のテレオペレーションを実現しました(図1)。
内容としては、簡易コントローラーを用いた多関節マニピュレータによる模擬作業試験と、専用のアクチュエータ操縦卓を用いた「おとひめ」の航行操作試験を実施しました。いずれの試験においても陸上のオペレータは、ほぼリアルタイムに「おとひめ」が撮影した海底のハイビジョン映像やその他3種類のTVカメラ映像、「おとひめ」のステータスデータ(探査機の状況を表すデータ)等(表1)をモニタリングしながら操作しました。また本試験では、陸上制御コンソールと船上制御コンソールとがTV会義システムで中継されており、オペレータと現場との音声によるコミュニケーションだけでなく、現場の状況を視覚的に伝えることもできました。
4.今後の展望
本成果は、最新のネットワーク技術を導入した無人探査機「おとひめ」と、世界最高水準のネットワーク回線を提供する超高速インターネット衛星「きずな」による技術的アプリケーションの実用性を示しただけでなく、近い将来、大きく進捗していくであろう"海のブロードバンド化"に対して、その実現性を示唆するものです。
今後の課題として、今回使用した「きずな」の高利得アンテナがカバーできないエリアにおいて“海のブロードバンド化”を拡大させていくための手段について研究開発を進めるとともに、通信の開始から自動的に遠隔操作でき、小型でメンテナンスフリーな次世代の船舶搭載局の開発に関係機関と連携して取組んでいきます。
また、伝送遅延や機器等の処理遅延を軽減させていくとともに、操作端末の操作性、機能性、及びネットワークの強靭性等を向上させ、本成果により得られた知見を多くの海中プラットフォームへ適用していくことを目指します。
<補足資料>
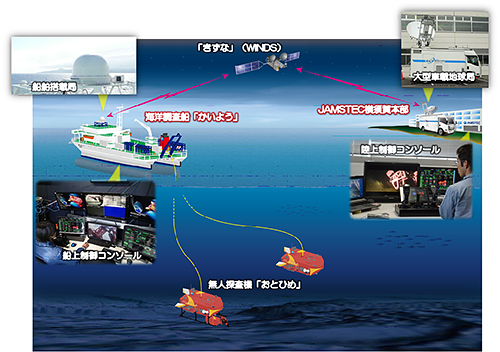
図1 衛星通信テレオペレーション概略図
表1 伝送情報一覧
| 陸上(JAMSTEC横須賀本部)から | 船上(「かいよう」)から | |
| ·「おとひめ」マニピュレータ制御指令 | ·「おとひめ」TVカメラ映像 | |
| 各軸回転速度+回転方向 指令値 | HDTVカメラ | |
| ·「おとひめ」推進器指令 | Pan-Tilt TVカメラ映像(NTSC) | |
| 左スラスタ回転数+回転方向 指令値 | 下方TVカメラ映像(NTSC) | |
| 右スラスタ回転数+回転方向 指令値 | 監視TVカメラ映像(NTSC) | |
| 左スラスタチルト角度 指令値 | ·「おとひめ」制御ステータス | |
| 右スラスタチルト角度 指令値 | 異常系情報/プロセス制御状況/機器計測値 | |
| ·「おとひめ」舵動作指令 | 機器状態/CPUコンディション etc. | |
| 水平翼角度 指令値 | ·「おとひめ」機器ステータス | |
| 垂直舵角度 指令値 | 推進器(各スラスタ/各スラスタチルト)FB値 | |
| 舵翼(水平翼/垂直舵)FB値 | ||
| ·TV会議システム(映像+音声) | マニピュレータ(各軸角度/ステータス)FB値 | |
| ·「おとひめ」観測センサステータス | ||
| CTD計 ステータス/計測値 | ||
| 蛍光濁度計 ステータス/計測値 | ||
| CO2-pHセンサ ステータス/計測値 | ||
| ·TV会議システム(映像+音声) |
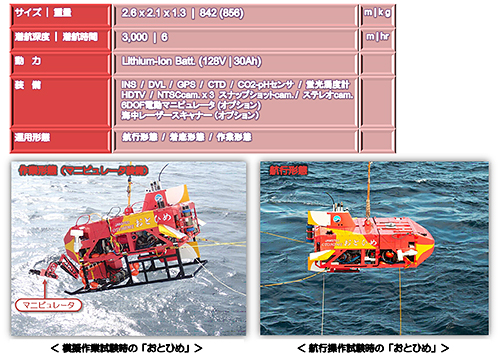
【参考1】無人探査機「おとひめ」
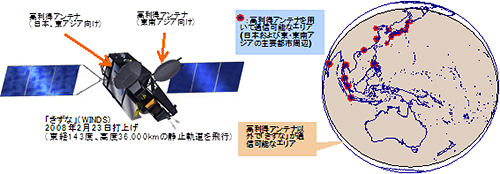
【参考2】超高速インターネット衛星「きずな」(WINDS)
アジア・太平洋地域のデジタル・ディバイドの解消、衛星利用の高度化等に必要なギガビット級の超高速衛星通信技術の確立を目的に、NICT及びJAXA が開発した技術実証を目的とした衛星です。衛星通信能力として、NICTが開発した再生中継器を用いることで最大155 Mbpsのメッシュ接続による通信が可能です。また、1.1 GHz帯域幅のベントパイプ型の衛星中継モードを用いれば、世界最高速の1.2 Gbps伝送が可能です。

【参考3】「おとひめ」陸上制御コンソールと船上制御コンソール
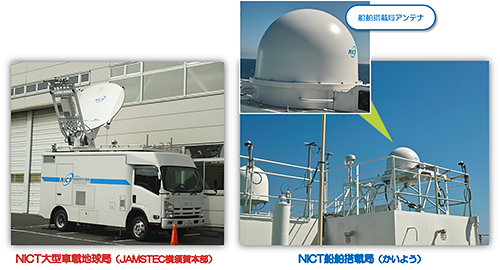
【参考4】「きずな」大型車載地球局と船舶搭載局

【参考5】テレオペレーションの様子
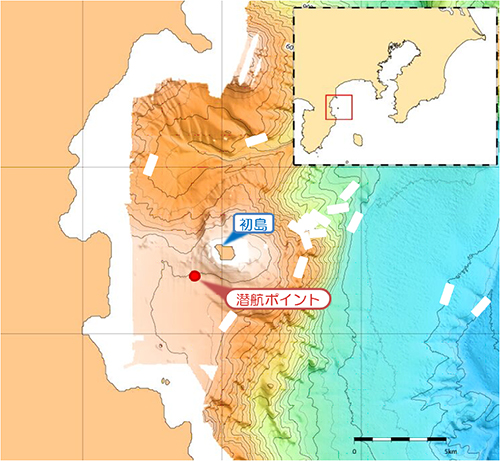
【参考6】 試験海域
潜航ポイント:
相模湾初島沖
深度約130mの海域
お問い合わせ先:
- 【JAMSTEC】
(本研究について) -
独立行政法人海洋研究開発機構
海洋工学センター 海洋技術開発部 探査機技術グループ
技術研究副主幹 石橋 正二郎
電話:046-867-9389 E-mail:sisibasi@jamstec.go.jp
- (報道担当)
- 独立行政法人海洋研究開発機構
広報部 報道課長 菊地 一成
電話:046-867-9198
- 【NICT】
(本研究について) - 独立行政法人情報通信研究機構
ワイヤレスネットワーク研究所宇宙通信システム研究室
研究マネージャ 髙橋 卓
電話:0299-84-7128 E-mail:takashi@nict.go.jp
- (報道担当)
- 独立行政法人情報通信研究機構
広報部 報道担当 廣田 幸子
電話:042-927-6923