プレスリリース
2015年 12月 3日
国立研究開発法人海洋研究開発機構
国立大学法人名古屋大学大学院環境学研究科
国立大学法人東京大学大気海洋研究所
国立研究開発法人海上技術安全研究所
オオミズナギドリと内航貨物船がとらえた津軽暖流の渦
~新たな観測手法がひらく海流予測の新展開~
1.概要
国立研究開発法人海洋研究開発機構(理事長 平 朝彦、以下「JAMSTEC」という)アプリケーションラボの宮澤泰正グループリーダーらは、国立大学法人名古屋大学(以下「名古屋大学)、国立大学法人東京大学大気海洋研究所(以下「東京大学大気海洋研究所」)、国立研究開発法人海上技術安全研究所(以下「海上技術安全研究所」)と共同で、これまで海流予測モデルのデータ同化*1に使用していた海洋観測データとは全く異なる種類のデータであるオオミズナギドリ*2の位置情報と内航貨物船*3の航行記録を活用することによって海流予測の精度が向上することを示しました。
JAMSTECアプリケーションラボで開発し、今回の実験に使用した海流予測モデル「JCOPE2」(以下、「JCOPE2」)は、漁業での活用を目指す漁海況予報に関する研究や、JAMSTECベンチャーにおける各種海洋産業や公的機関を対象とした情報コンサルティング事業に活用される等、研究成果の社会応用の取り組みで先駆的に実績を上げてきた海流予測モデルです。
JCOPE2では、海流分布の海洋観測データを主に人工衛星から取得していましたが、本研究は、海流予測モデルが海洋生物や内航貨物船から取得できるデータと連携することによって海流分布の海洋観測データを劇的に強化する可能性を示唆しています。特に内航貨物船から取得するデータによるデータ同化で海流予測の精度が向上することは、その結果が内航貨物船の効率的な運航にフィードバックされるという仕組みが機能するようになるため、持続可能な高密度の海流観測網の出現が期待されます。その他にも、海流予測の精度向上は漁業や海底資源開発など各種海洋産業への活用が期待されます。
本成果は、英科学誌「Scientific Reports」に12月3日付け(日本時間)で掲載される予定です。
- 題名:
- Assimilation of the seabird and ship drift data in the north-eastern sea of Japan into an operational ocean nowcast/forecast system
- 著者名:
- 宮澤 泰正1、郭 新宇1,5、Sergey M. Varlamov1、美山 透1、依田 憲2、佐藤 克文3、加納 敏幸4、佐藤 圭二4
- 所属:
-
1 国立研究開発法人海洋研究開発機構
2 国立大学法人名古屋大学大学院環境学研究科
3 国立大学法人東京大学大気海洋研究所
4 国立研究開発法人海上技術安全研究所
5 国立大学法人愛媛大学沿岸環境科学研究センター (国立研究開発法人海洋研究開発機構 招聘上席研究員)
URL:http://dx.doi.org/10.1038/srep17672
2.背景
膨大な量の熱や物質を運ぶ海流は、海の環境変動や気候変動において大きな役割を果たしており、その様子を知り将来の動きを予測することは海洋物理学の重要な課題であり続けています。現在、海流の分布を観測するために最も重要な観測手段は、海面の水位変動を計る人工衛星です。海の表層海流分布は、基本的に海面水位の勾配によって決まるからです。また海流予測は、人工衛星の観測データと海流予測モデルの計算結果を組み合わせて海流分布の現状を推定し(データ同化)、これを出発点としてさらに海流予測モデルを計算することによって予測結果が導かれます。
人工衛星による海流分布観測の水平解像度はまだまだ粗く、現状では直径100km以上の大きさの渦を検出するにとどまっています。これは、海流を観測するために重要な海面水位変動観測衛星の測点が衛星軌道に沿って線的に分布しており(図1、灰色部分)、これによって生じる測線と測線の間の観測の空隙が、海流を検出する空間解像度の限界をもたらしているためです。また、浅い沿岸寄りの海域では海面水位変動の計測精度が落ちてしまうという問題もあります。これらの検出限界を向上させるために、新しい人工衛星の開発が進んでいますが、まったく別の観測手法によってもこの問題を解決する方向性が見えてきました。それは、思いがけず動物行動学・船舶工学といった異分野の研究者たちによってもたらされました。
動物行動学では近年、小型のデータロガー(記録計)を野生動物に装着して行動を追跡する手法であるバイオロギングの研究、特に人工衛星による全地球測位システム(GPS)の発展を背景としてGPSロガーを用いた動物の移動追跡研究が盛んになっています。名古屋大学、東京大学大気海洋研究所の研究グループは、オオミズナギドリという海鳥を対象として、東北・北海道沖での採餌行動に伴う海上休息位置の変動(偏流)から海流を推定し、例年夏から秋にかけて発達する津軽暖流の渦を検出することに成功しました*4。一方、海上技術安全研究所のグループは、日本各地の港を結んで航行する内航貨物船に気象データや海流予測を含む海象データを提供し効率的な運航を行うことによって燃費・CO2排出量削減に貢献する社会実験を進めていますが、並行して、内航貨物船の航行記録から対地速度と対水速度の差(偏流)によって海流を検出する技術の開発も進めています*5。今回、対象としたオオミズナギドリの行動域と同じ東北・北海道沖での内航貨物船偏流データが、同様に津軽暖流の渦を検出できていることがわかりました。そこで、オオミズナギドリと内航貨物船の偏流データを海流予測モデルに同化し、海流予測モデルにおける海流の再現性に及ぼす効果を調べました。
3.成果
JAMSTECで開発、運用している海流予測モデル「JCOPE2」に、オオミズナギドリ偏流データを同化する実験を行いました。図2左は、2010年9月8日から9月16日の間に12羽のオオミズナギドリのGPSログに記録された海上休息位置の変動(偏流)から推定した海流(青矢印)と、オオミズナギドリ偏流データを同化せず人工衛星データ等を同化したJCOPE2による海流の期間平均推定結果(黒矢印)を比較したものです。人工衛星データの同化により、津軽海峡から流出する津軽暖流が作る時計回りの渦(津軽暖流渦モード)とそれに伴って沿岸を南下する海流の様子は基本的にモデルによって再現されており、オオミズナギドリ偏流データとも比較的よく一致しています。オオミズナギドリ偏流データを同化した結果(図2右)、津軽暖流渦モードとその下流の南下流がより強めに表現されるようになり、それは両者の違いを示した図3でよくわかります。同時期、同海域に独立に存在した海面漂流ブイから算出した偏流データと比較したところ、同化しない結果に比べて、オオミズナギドリの偏流データを同化した方がより良く一致するようになりました(図4)。
同様に、2014年9月17日から10月7日の間に航路を複数回往復した内航貨物船の偏流データを同化することにより、時計周りの渦がより大きく強く表現されるようになりました(図5,6)。この場合は参照するべき他の漂流ブイ等の観測結果はありませんが、図5右のように渦モードが大きく発達している様子は、海上保安庁が発行している同時期の海洋速報でも報告されています。
また、オオミズナギドリと内航貨物船の偏流データの測点を精査したところ、海流を検出する空間解像度の限界をもたらしていた海面水位変動観測衛星の測点の空隙を、オオミズナギドリと内航貨物船の測点が埋めるように分布して、従来の人工衛星観測網に加えて海流観測を強化できることが示唆されました(図1、青色部分)。さらに、浅い沿岸寄りの海域では海面水位変動の計測精度が落ちてしまうという問題については、特にオオミズナギドリ偏流データに関する同化実験の結果から、今回対象とした12羽のデータにより従来の人工衛星の検出限界100kmより小さい直径50km程度の渦まで捕捉できる可能性が示唆されました。
4.今後の展望
今回のオオミズナギドリと内航貨物船の偏流データを海流予測モデルに同化する実験の結果から、今後偏流データの測点の数を増やしていけば、海流観測の解像度を劇的に改善する可能性があることが示唆されました。特に内航貨物船による海流計測については、データ同化によって海流予測の精度が向上し、その結果が内航貨物船の効率的な運航にフィードバックされるという仕組みが機能するようになれば、こうした観測を維持する動機付けが自生的に働くようになり、持続可能な高密度の海流観測網の出現が期待されます。
オオミズナギドリと内航貨物船の偏流データは、海流成分だけではなく、風圧によって位置が変化することによる成分(風圧流成分)や、風波の影響によって生じる変動成分も含んでいることに注意する必要があります。今回、2010年と2011年のオオミズナギドリ偏流データの同化効果を比較すると、2011年の場合は台風の影響などで風や波による成分がより卓越するため、2010年の場合に比べて同化効果が小さくなることがわかりました。今後、漂流ブイの挙動とオオミズナギドリの海上での挙動を直接比較する現場観測を行うなど、この点について詳しく調べていく必要があります。また内航貨物船についても、船舶進行方向に直交する方向では風や波による成分が特に強くなることがわかっており、検討が必要です。
バイオロギングではロガーの小型化・軽量化が進み、海洋においては海鳥に加えウミガメや哺乳類など様々な種への適用が広がっています。また、GPSロガーによる位置情報だけではなく水温や塩分など様々な物理量の計測も可能になっています。バイオロギングでは原理的に、「対象とする生物種が行かない場所は計測できない」という欠点がありますが、これは適用する生物種を増やしていけば解消できる問題です。海鳥の場合は、餌生物の豊富な海域に留まり続ける習性があるため、生物生産性の高い海域を集中的に計測できます。
バイオロギングや船舶航行記録の活用にあたり、様々な問題を克服する必要はありますが、今後、海洋モデルに加え大気モデルなど、様々なモデルのデータ同化への適用拡大が期待され、さらには海流予測の精度が向上することで、海運業界での効率的な運航を始めとする各種海洋産業への活用も期待されます。
[用語解説・注]
*1 データ同化
ここでは、人工衛星等の観測データと海流予測モデルの計算結果を組み合わせて海流分布の現状を推定することを言います。一般的には、観測を行った時点での観測されていない地点を含む全ての空間データを作成するためにモデル計算に観測結果を取り入れることを言います。
*2オオミズナギドリ

撮影:依田憲(名古屋大学)

撮影:菅原貴徳(名古屋大学)
*3 内航貨物船

提供:日本海運(株)・日本通運(株)
*注:roll-on/roll-off船:トレーラーなどの車両が直接出入りして貨物の積み降ろしができる船
*4 発表論文 Yoda, K., K. Shiomi, and K. Sato, 2014: Foraging spots of streaked shearwaters in relation to ocean surface currents as identified using their drift movements, Progress in Oceanography, 122, 54-64. また本研究で使用されたオオミズナギドリのGPSログデータは、科学研究費補助金(24681006, 20241001)の支援を受けて取得されたものです。
*5 本研究で使用された内航貨物船の偏流データは、「航海・配船計画支援システム導入による船舶からのCO2排出削減実証事業」(環境省)によって取得されたものです。
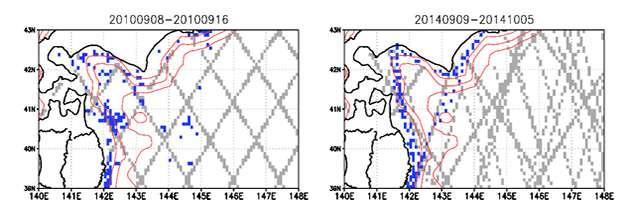
図1. 海面水位変動観測人工衛星の測点分布(灰色部分)と、偏流観測点分布(青色部分、左:オオミズナギドリ、右:内航貨物船)。赤線は、400, 800, 1000mの等水深線を示す。左: 2010年9月8日から9月16日。右:2014年9月9日から10月5日。
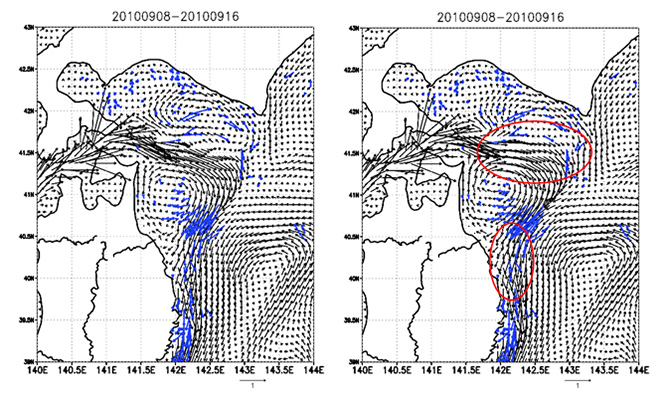
図2. 2010年9月8日から9月16日における平均海流分布。黒矢印は海流予測モデルJCOPE2の5m深海流分布、青矢印はオオミズナギドリの偏流データを示す。左:オオミズナギドリ偏流データを同化する前。右:同化した後。図下の矢印は1m/secの大きさを示す。データ同化によって海流の表現が特に変わった領域を赤丸で示す。
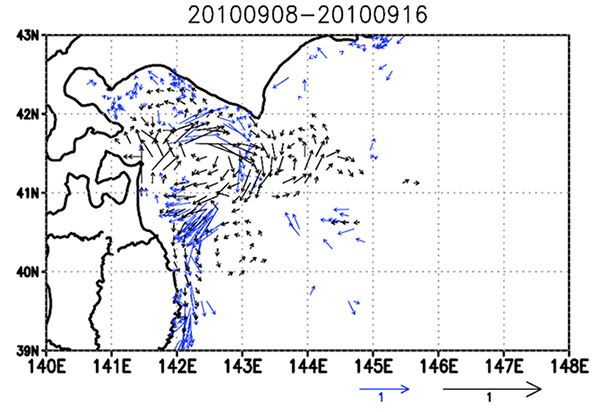
図3. 黒矢印:オオミズナギドリ偏流データ同化前後の海流表現の変化(図1右と左の差)。青矢印:オオミズナギドリ偏流データ。図下の青矢印は偏流データの1m/secの大きさを示し、黒矢印は、海流表現の差の1m/secの大きさを示す。
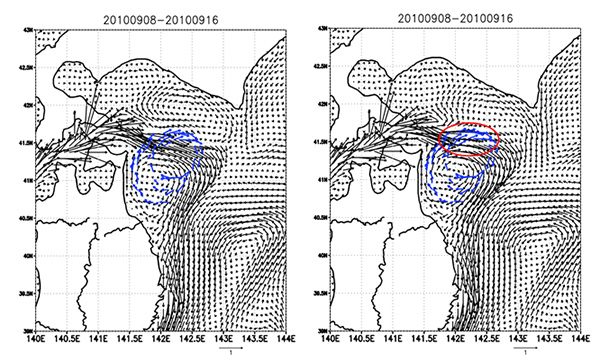
図4. 2010年9月8日から9月16日までの平均海流分布。黒矢印は海流予測モデルJCOPE2の5m深海流分布、青矢印は同時期に独立して存在した海面漂流ブイのデータを示す。左:オオミズナギドリ偏流データを同化する前。右:同化した後。図下の矢印は1m/secの大きさを示す。データ同化によって海流の表現が海面漂流ブイのデータに似るようになった領域を赤丸で示す。
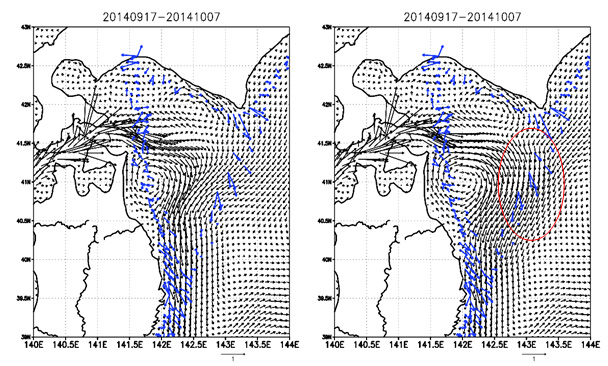
図5. 2014年9月17日から10月7日までの平均海流分布。黒矢印は海流予測モデルJCOPE2の5m深海流分布、青矢印は内航貨物船偏流データを示す。左:内航貨物船偏流データを同化する前。右:同化した後。図下の矢印は1m/secの大きさを示す。データ同化によって海流の表現が特に変わった領域を赤丸で示す。
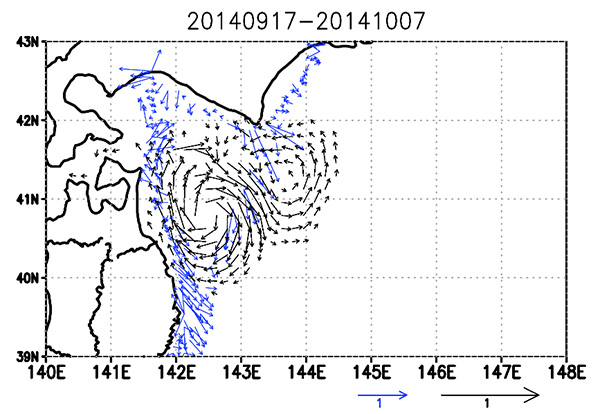
図6. 黒矢印:内航貨物船偏流データ同化前後の海流表現の変化(図3右と左の差)。青矢印:内航貨物船偏流データ。図下の青矢印は偏流データの1m/secの大きさを示し、黒矢印は、海流表現の差の1m/secの大きさを示す。
- (本研究について)
-
国立研究開発法人海洋研究開発機構
アプリケーションラボ 海洋・大気環境変動予測応用グループ
グループリーダー 宮澤 泰正 -
国立大学法人名古屋大学 大学院環境学研究科
教授 依田 憲 -
国立大学法人東京大学大気海洋研究所
教授 佐藤 克文 -
国立研究開発法人海上技術安全研究所 運航計画技術研究センター
センター長 加納 敏幸 - (報道担当)
-
国立研究開発法人海洋研究開発機構
広報部 報道課長 松井 宏泰 -
国立大学法人名古屋大学
総務部 広報渉外課長 福地 克美 -
国立大学法人東京大学大気海洋研究所
広報室 小川 容子 -
国立研究開発法人海上技術安全研究所
企画部 広報主管 横川 良二