プレスリリース
2016年 11月 24日
国立研究開発法人海洋研究開発機構
小型AUV試作機による北極海海氷下の撮影に成功
~先進的北極観測技術の開発に係る今年度の結果と今後の展望~
1.概要
国立研究開発法人海洋研究開発機構(理事長 平 朝彦、以下「JAMSTEC」という。)、北極環境変動総合研究センター北極観測技術開発ユニットの渡健介技術副主任、杉本文孝技術主任および坪根聡特任技術主任(現在 株式会社インターリンク在勤)らは、平成28年8月から10月にかけて実施したJAMSTECの海洋地球研究船「みらい」による北極海における研究航海(航海番号:MR16-06)において、小型の自律型無人潜水機(AUV)の試作機(Retrievable Arctic Icy edge observation Vehicle、以下「RAIV」という。)を用いた試験観測を実施し(図1)、我が国で初めて北極海における海氷下の自律航走に成功するとともに、塩分、水温などの観測データを取得し、海氷下の映像の撮影に成功しました。
RAIVは、将来的な北極海観測のための本格的なAUVの開発に向けた知見を蓄積するため、平成27年度に開発に着手した小型軽量なAUVの試作機で、潮流の弱い環境でのシナリオ航行のみに特化したものです。全長約1.9m、重量27kg程度と非常にコンパクトな形状で(図2)、わずか二人で投入と揚収ができるのが大きな特長です。
RAIVには、通常の海洋観測において標準の計測項目である水温、塩分、深度を測る各種センサを搭載するとともに、映像取得のためのカメラが装備されており、往復航行シナリオの自律航走観測を通して、海氷域の水温、塩分計測や映像による海氷下の様子や海洋生物の活動の様子などを捉えることができます(図3)。また、オプションセンサ搭載のためのスペースも持たせており、水中音響機器を用いての航走位置の計測や、溶存酸素計測、照度の計測など用途に応じて計測項目を追加することが可能です。ただし音響機器での測位については近距離に限られるため、今回の北極海での試験観測では搭載しませんでした。最大潜航深度は200m、観測および航走可能時間は最大で9日間です。
今後、JAMSTECでは、RAIVの開発及び海氷下における試験観測から得ることができた知見や課題を活かし、引き続き本格的な海氷下観測に向けたAUVの開発を推進して参ります。
2.背景
平成27年10月に「我が国の北極政策」が策定され(平成27年10月16日総合海洋政策本部決定)、当該政策における具体的な取組みの一つとして、「自律型無人潜水機(AUV)等を用いた国際的な北極域観測計画への参画を可能とする機能や性能を有する、新たな北極域国際研究プラットフォームとしての北極域研究船の建造に向けた検討を行う。」ことが盛り込まれました。
本政策にあるように、北極研究を進めるためにはAUVが必要となりますが、我が国ではこれまで北極海観測に用いるAUVの開発経験や運用経験に極めて乏しく、簡易な技術開発と初歩的な運用経験の蓄積から開始する必要がありました。特に海氷に覆われる海域では、観測装置が海氷に阻まれて浮上できないため、通常の海域での観測のようにGPS(Global Positioning System:全地球測位システム)による測位を行うことができません。この点は本格的なAUVを開発するにあたって今後解決すべき大きな課題となります。
そこで、JAMSTECでは今回、①往復自航すること(位置測位はなし)、②観測装置として最低限のデータ(塩分、水温、深度)を取得すること、③海氷下の映像を取得することの3点をテーマに掲げ、平成28年度の「みらい」北極海航海における試験観測の実施を目標として、平成27年10月より、試作機の開発に着手いたしました。
3.成果
今回JAMSTECにおいて開発したRAIVは、海氷が漂う北極海域において航走観測に挑戦し、水温、塩分およびその深度計測、海氷下(裏)の映像取得ならびにオプションセンサによる溶存酸素計測や照度計測に成功しました。本体回収後に内部に記録された行動ログを解析した結果、航走している間の深度や姿勢、方位の制御はうまく動作しており、安定して航走していたことが確認されました。
RAIVでは、浮力制御による姿勢制御と左右のスラスタ推力調整のみによる方位制御を採用しています。このうち方位制御については、方位の取得に地磁気センサを採用しましたが、磁極が近いためにその有効性が懸念されました。しかし、結果的に十分な強度の地磁気が得られていたことが確認され、北極海環境での地磁気センサによる方位制御について、磁北から一定距離を保った海域では有効であることが確認されました。また、RAIVには潮流の弱い環境に特化した、低推力スラスタを搭載しているため、強潮流環境での推進は困難ですが、必要最低限の部品点数で構成された試作機は高い信頼性を誇っており、常時安定した動作を継続していました。
また、RAIVに実装された弱潮流環境に特化した冗長的な制御アルゴリズムにより、精緻な深度、方位維持は困難ですが、長時間の運用が可能です。浮力と推力の調整のみという簡素な方式の採用により、開発期間の短縮と、消費電力の低減を両立しています。
今回のRAIVの航走によって撮影された映像には、海氷下で多数のプランクトンが活動する様子を捉えられるとともに、海氷裏の形状も捉えることができました(図4)。そして多年氷の裏の形状は複雑で、AUVでの接近の際は、何らかの対策を講じなければ、場合によっては海氷接近時に機体が拘束される可能性が十分にあり得ることも判明しました。また、低温環境に起因すると思われる機器の異常回避行動も記録されており、こうしたことは今後の課題として新たに解決していく必要があります。
4.今後の展望
RAIVは、国内のべ10社以上の協力を得て、実質的な開発期間が10ヶ月という短期間で信頼性の高い小型AUV試作機を開発することができました。また、試験観測では、我が国で初めて北極海における海氷下のシナリオ航走に成功するとともに、塩分、水温、深度などの観測データを取得し、海氷下の映像の取得に成功しました。今回得られた知見、さらには設計、評価方法、JAMSTEC内製による製造・組み立て技術を生かし、今後の北極海での科学研究と本格的な北極海観測用のAUV開発を進めて行きたいと考えています。
一方で、現状では海氷下における位置測位が困難であるため、データを得られたとしても、どの海域のデータなのか正確に把握できず、科学的に十分意義のあるデータとは言えません。JAMSTECでは、今後、本課題の解決に向けた要素技術の開発に着手する予定です。
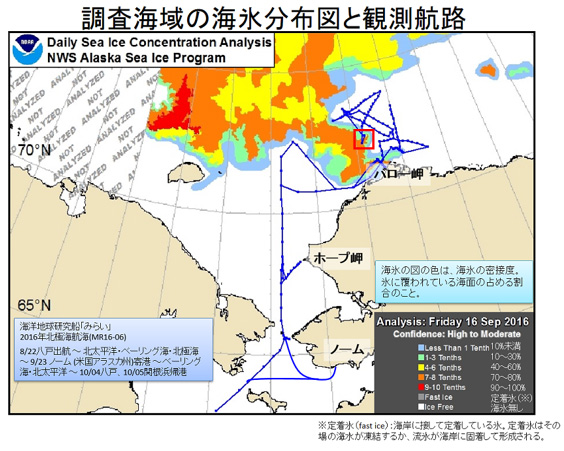
図1 海洋地球研究船「みらい」による北極海における研究航海航路とRAIV観測実施海域(図中赤□枠付近)

図2 RAIVとその諸元
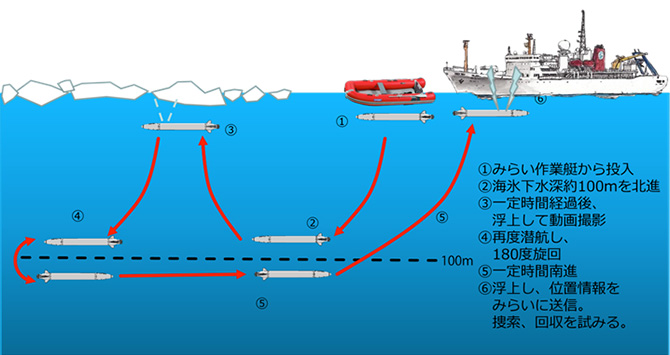
図3 RAIVが行う直線往復シナリオ航走観測のイメージ
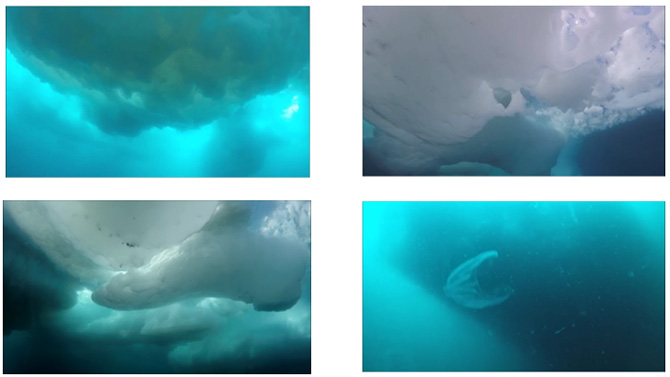
図4 本体上面より海面を望み、取得した水中映像
海氷直下にて撮影された映像、右下生物はクシクラゲの映像
小型AUV試作機による北極海海氷下の撮影に成功
- 国立研究開発法人海洋研究開発機構
- (本試作機の開発について)
- 北極環境変動総合研究センター北極観測技術開発ユニット
技術副主任 渡 健介 - (JAMSTECの北極域研究事業全般について)
- 北極環境変動総合研究センター
調査役 赤根 英介 - (報道担当)
- 広報部 報道課長 野口 剛