プレスリリース
2017年 5月 19日
国立研究開発法人海洋研究開発機構
UROVシステム試験機のビークル回収断念について
1.概要
国立研究開発法人海洋研究開発機構(理事長 平 朝彦)(以下、「JAMSTEC」)は、マリアナ海溝において、深海調査研究船「かいれい」を用いて、大深度における高速大容量光通信要素技術などの技術評価試験のため、11,000m級UROVシステム(以下UROV、※1)試験機による潜航試験を行っていたところ、作動確認等の試験終了後に、UROVのビークルが水深5,320mの海中から浮上できない状況となりました。その後、ビークルの回収を試みましたが、本日回収を断念することとしましたのでお知らせいたします。
2.状況
JAMSTECでは、次世代深海探査システムの技術開発の一環として、ランチャー/ビークル方式UROVの運用技術や高速大容量光通信等の要素技術の技術評価試験のため、5月5日に横須賀本部を出港した「かいれい」で、UROV試験機の潜航試験航海を実施していました。
5月14日、マリアナ海溝の水深約10,900mの海域(北緯11度22.0分、東経142度33.0分、図1)において、UROV試験機の大深度下での航走試験や機器の作動確認試験を終了しました。その後、11時20分(現地時間)に「かいれい」からの操作により、ビークルの浮上を開始したところ、上昇速度が徐々に低下し、22時30分頃(現地時間)、水深約5,320mの海中において上昇が停止し、浮上できず浮遊する状態となりました。
その後、ビークル回収用フックなどを使って、5月18日までの間、回収を試みましたが、回収に至らず、5月19日午前中に試験機の回収断念を決定し、「かいれい」は海域を離脱しました。
今回の事象の原因については、バラスト切り離し不全などが考えられますが、今後詳細に検討したうえで、同形式のバラスト切り離し機構による機体浮上の安全確保に向けて改良を進めていく予定です。
なお、浮遊状態のビークルについては、浮遊水深が約5,320mと深いこと、ならびにビークルが小型であることから、船舶等の第三者に人的被害、船体損傷等の影響を及ぼす可能性は低いと考えます。
※1 UROV(Untethered Remotely Operated Vehicle)
細径ケーブル式遠隔操作型無人機。ROV(Remotely Operated Vehicle、遠隔操作型無人機)の中で、動力源となる電池を機体内に搭載し、母船あるいはランチャーとビークルは細い径の光ファイバーケーブル1本で結ばれているもの。通常のROVに比べケーブルに作用する海水の抵抗等が低く抑えられる。
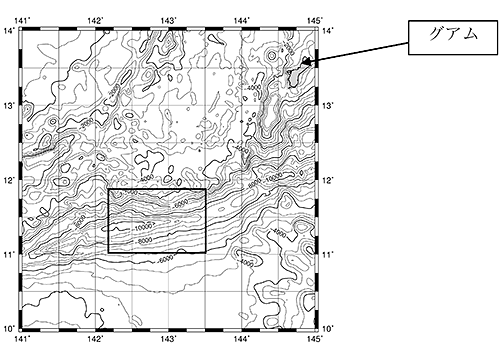
(a)海域全体図
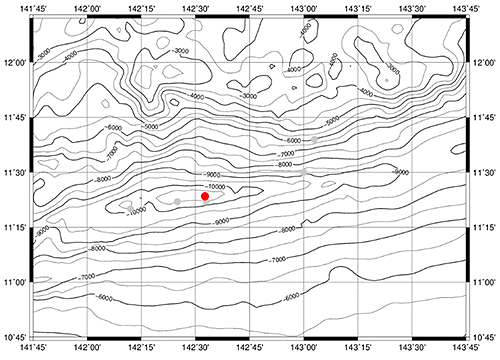
(b)海域拡大図
図1 発生場所
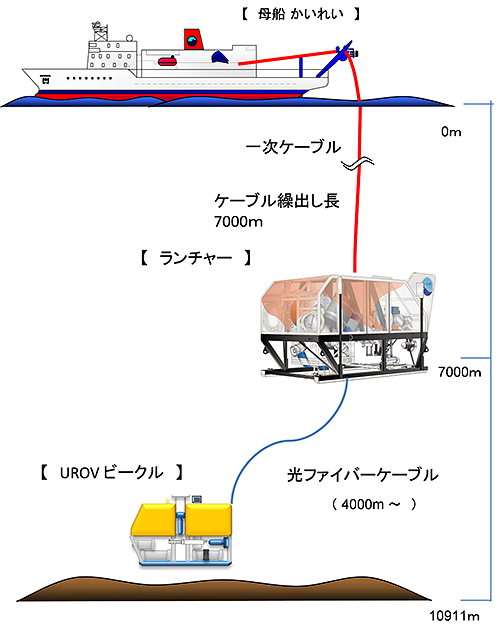
(a)システム概要

(b)ビークル (長さ1.7m×幅1.2m×高さ1.4m)
図2 11,000m級UROVシステム
- 国立研究開発法人海洋研究開発機構
- (本内容について)
- 海洋工学センター 海洋戦略技術研究開発部 部長 大澤 弘敬
- (報道担当)
- 広報部 報道課長 野口 剛