プレスリリース
平成30年11月20日修正
(図差替え)
国立研究開発法人海洋研究開発機構
AUV複数機運用による海底下構造調査に初めて成功
~海底熱水鉱床等の海洋鉱物資源の高効率な調査手法にむけて~
1. 概要
国立研究開発法人海洋研究開発機構(理事長 平 朝彦、以下「JAMSTEC」という。)は、戦略的イノベーション創造プログラム(※1、以下「SIP」という。)の課題「次世代海洋資源調査技術(海のジパング計画)」におけるテーマ「海洋資源の成因の科学的研究に基づく調査海域の絞り込み手法の開発」で電磁気学的手法をベースとした調査技術開発を行ってきました。この度、中部沖縄トラフの既知の熱水鉱床賦存域での調査航海において、自律型無人探査機(※2、以下「AUV」という。)「じんべい」と「ゆめいるか」を同時に運用し、AUV間で電流の送受信を行って海底下構造を調査することに成功しました(※3)。
JAMSTECではこれまで、曳航体から200m程度の電極アレイケーブルを曳航し、そこから電流を送信し、海底下から信号を受信する技術を確立するための成果を挙げてきました(図1)。曳航体による観測は、仕組みが比較的簡単でリアルタイムでのデータ確認も可能であるなどメリットも多い一方、長い電極アレイケーブルを海底から高度30-50m程度で曳航するため、観測測線の方向を変える際に大きな時間のロスが生じるという課題を抱えており、さらなる効率化が求められてきたところでした。
そこで本調査航海では、これらの課題解決のため、海底広域研究船「かいめい」から「じんべい」を、洋上中継器(※4、以下「ASV」という。)から「ゆめいるか」を監視させ、複数機運用による海底下構造データの取得を試みました。その結果、熱水鉱床の存在と関連付けられる低比抵抗域と自然電位の負の異常域を検出しました(図2、3、4、5)。
これらの結果は、これまでの曳航体(※5)を用いた調査結果と非常に調和的であり、2機のAUVを用いた調査によって、海底下構造のデータを適切に取得することができたと言えます。また、曳航体による調査と比較して航行速度が2倍、測線から測線への移動時間が5分程度と短くなることから、効率的な調査法として極めて有効であることが実証されました。
2機のAUVを同時に運用するだけでなく、電磁気学的手法にもとづいた調査により海底下の情報を得ることに成功したのは世界で初めてのことであり、今後の効率的な熱水鉱床などの海底下構造の調査が加速されることが期待されます。
2.研究の背景・目的
海洋での資源調査は船舶により調査を行う必要があり、陸上での調査に比べて費用がかかります。将来海底資源の開発を実現するためには、船舶の運用などにかかるコストをできる限り軽減することが必須です。そのためには、海底資源の存在を知るために低コスト、かつ、効率のよい調査システムとその手順を確立することが必要であり、本SIP事業においては、海底及び海底下に存在する資源の成因研究や調査法の技術開発を行うことで、海洋での資源調査に適切な調査技術プロトコル作りを推進しています。
陸上の鉱物資源調査は、一般的に人工信号源を用いた電気探査や電磁探査(※6)などの調査手法が用いられています。これは周囲の岩盤に対して鉱物を含む領域の方が、電気が流れやすい性質(比抵抗あるいは電気伝導度と呼ばれる)を利用するものです。最近ではヘリコプターを用いた空中電磁探査法が一般的になり、効率的に調査を行うことができるようになりました。
一方、海底下の鉱物資源の存在を知るためには、海中や海底のデータを取るだけでは不十分で、海底下をイメージングすることが重要です。これまで、海底下浅部を詳細に調べる手法は確立されているとは言えない状況でしたが、JAMSTECでは、曳航体から200m程度の電極アレイケーブルを曳航し、そこから電流を送信し、海底下からの信号を受信する技術を確立し、民間企業でも運用可能な状況になりました。この手法の開発の過程で得られたデータを解析すると、送信した信号を用いた電気探査法による比抵抗構造の情報以外にも、鉱体の存在に関連する信号が記録されていることが分かりました。これは、鉱体が海底下で化学反応により電池のような振る舞いをしていることにより、観測データから抽出される電位の空間分布に負の異常を形成するものです(※7)。こうした電位異常を捉える調査手法は自然電位探査と呼ばれますが、陸上の調査では得られるデータの精度や観測の困難さから用いられていない手法です。一方、海洋では空間を3次元的に動くことが可能であるため比較的簡便に観測でき、海底熱水鉱床調査には有効な方法と考えられるようになりました。また、この観測は曳航体に必要な曳航ケーブルがなく水中をより自由に移動できるAUVとも非常に親和性が高いと言えます。
曳航体による観測は、仕組みが比較的簡単でリアルタイムでのデータ確認も可能であるなどメリットも多い一方で、長い電極アレイケーブルを海底から高度30-50m程度で曳航するため、観測測線の方向を変える際に大きな時間のロスが生じ、稠密な測線配置を行う場合にはデメリットになってしまいます。また、急峻な地形へ沿うように航走すると、電極アレイが海底から離れすぎたりして十分なデータを取得できない可能性もあります。曳航体では、配置が固定される送信部と受信部を用いる必要があるため、このようなデメリットが生じますが、複数のAUVにその役割を担わせることで機動性の高い観測が可能になります。
そこで本調査航海では、電流源を搭載した「じんべい」から電流送信を、電位計を搭載した「ゆめいるか」で信号受信を行い、独立して海中を航行させ、既知の熱水鉱床域において実践的な潜航調査を実施し、その実用性の検証を行いました。
3.成果
本調査では、設定した測線に沿って電流源を搭載した「じんべい」が先行し、受信機を搭載した「ゆめいるか」がその後ろを追いかけるように運用しました。海底広域研究船「かいめい」は「じんべい」を、ASVは「ゆめいるか」を監視することにより、AUV2機間の距離を適切に調節しながら潜航調査を行いました。調査は中部沖縄トラフの2海域で実施し、そのうち1海域ではAUVに加え、受信機として自己浮上型海底電位計(※8)も設置して観測を行いました。
調査で得られた観測データを用い、電気探査による解析を行って見かけ比抵抗(※9)を求めた結果、海底熱水域と考えられる領域と低い見かけ比抵抗領域が一致することが分かりました(図4)。また、自然電位異常の分布でも、海底熱水域と一致する明瞭な負の異常域を検出することができました(図5)。双方のデータがともに鉱体を示すと考えられるデータの傾向を示していることから、AUV2機による調査が適切に海底下の情報を抽出できていることが分かりました。また、同時に取得されたソナーデータからは数mオーダーの精密な海底地形データが取得されました。
このように、2機のAUVを同時に運用するだけでなく、電磁気学的手法にもとづいた調査手法で海底下構造の情報を得ることに成功したのは世界で初めてです。
この調査結果は、実質的に4時間程度の潜航時間で取得されています。これは1ノット前後となる曳航体の航走速度に対し、2ノット程度とAUVが速い速度で航走できることと、測線から測線への移動時間が曳航体では1時間程度だったものが、AUVでは5~10分程度と極めて短いことによります。この点からも、AUV2機による調査が極めて有効であることが実証されました。
また、各AUVには精密な海底地形データを得るソナーだけでなく、濁度計やCO2センサーなどの化学センサーを多数装備し、一度に多数のデータを得ることができました。
4.今後の展望
今回の調査では、8時から17時までという作業時間やAUVのバッテリー容量の制限から、実質的な潜航時間が4時間程度に制限されてしまいました。今後、AUVのバッテリー容量の拡大やAUVとASVの着揚収作業性の向上により、越夜でのオペレーションが可能になれば、観測時間が5-6倍に増えるため、より稠密な観測もしくは広域での観測が可能になり、飛躍的に効率のよい観測が可能になります。今回は、AUV間の距離の制御をオペレーターの指示により行っていましたが、AIなどを用いた制御が可能になることで、より正確な位置制御が可能になると思われます。また、複数機の受信AUVを用いることが可能となれば、調査可能な深さをより自在に変えたり、3次元的なデータをとるなど、調査の自由度を飛躍的に高められることが考えられます。
※1 戦略的イノベーション創造プログラム(SIP):
総合科学技術・イノベーション会議(CSTI)が自らの司令塔機能を発揮して、府省の枠や旧来の分野の枠を超えたマネジメントに主導的な役割を果たすことを通じて、科学技術イノベーションを実現するために平成26年度より5カ年の計画で新たに創設したプログラム。CSTIにより選定された11課題のうち、「次世代海洋資源調査技術(海のジパング計画)」(プログラムディレクター 浦辺 徹郎、東京大学名誉教授、国際資源開発研修センター顧問)はJAMSTECが管理法人を務めており、海洋資源の成因に関する科学的研究に基づく調査海域の絞り込み手法の開発、海洋資源調査技術の開発、生態系の実態調査と長期監視技術の開発、それらを統合した統合海洋資源調査システムの構築と、民間企業へ技術移転を実施している。
(https://www.jamstec.go.jp/sip/index.html)
※2 自律型無人探査機(AUV):
機体に内蔵されたコンピュータにより設定されたシナリオに従って、海底近傍を自律して航走できる無人の探査機。高解像度の海底地形を取得するソナーや、様々なセンサーを搭載して観測をすることができる。
※3 海底広域研究船「かいめい」KM18-04C航海(首席研究者:笠谷貴史、JAMSTEC次世代海洋資源調査技術研究開発プロジェクトチーム・主任技術研究員、調査期間:平成30年4月16日~5月21日)
※4 洋上中継器(ASV):
機体に内蔵されたコンピュータにより設定されたシナリオに従って、海面を自律して航走できる無人の航走体。船体にはセンサーや海中の観測機器、ビークルとの通信を行う機器を装備する。
※5 曳航体:
様々な観測機器を搭載し、船舶からケーブルで曳くことにより水中を移動する水中航走体。通信可能なケーブルを用いると、リアルタイムで搭載した観測機器からのデータを船上で得ることができる。
※6 人工信号源を用いた電気探査・電磁探査:
地下に電流を送信もしくは磁場を発生させて地下に浸透させ、その応答を検出することで地下を調査する技術。
※7 自然電位異常 平成30年11月20日、下図を差し替えました。
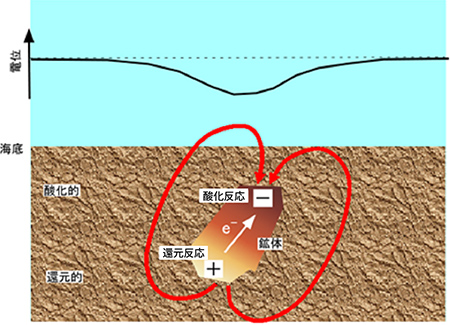
海底下に存在する鉱体が、化学反応(流体の存在などによる酸化還元反応)により浅部でマイナス極、深部でプラス極の極性を持つ電池のような振る舞いをする。海底に近い位置にマイナス極が存在するため、観測される電場から計算される電位は鉱体の近傍で負の異常を形成する。
これらの現象を観測した結果については下記の論文で公表されている。
Kawada and Kasaya, Scientific Reports, 7:13552 (2017), DOI: 10.1038/s41598-017-13920-0.
※8 自己浮上型海底電位計(OBE)
船上からの指示通信により海底から海面へ自己浮上する、投込み式の電位測定器。
今回は「じんべい」が発信する電流を受信させ、測位やデータの補足に用いた。
※9 見かけ比抵抗
送受信電極の組み合わせから計算される比抵抗値だが、浅部から電極間距離で決まる探査深度までの平均的な比抵抗値を示す。今回の調査の場合、おおよそ海底面から20~30m程度までの平均的な電気抵抗を示す。
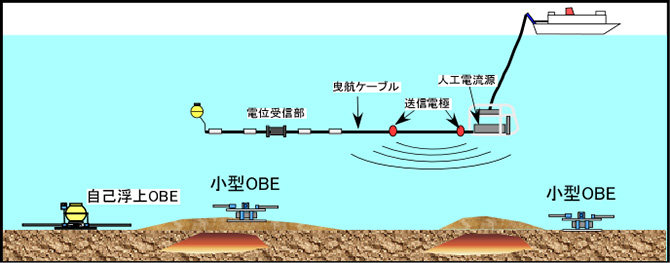
図1. 曳航式電気探査の模式図
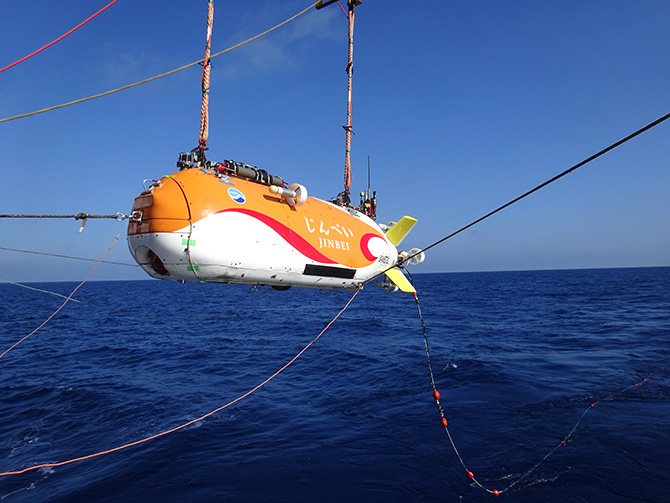
図2-1. AUV「じんべい」
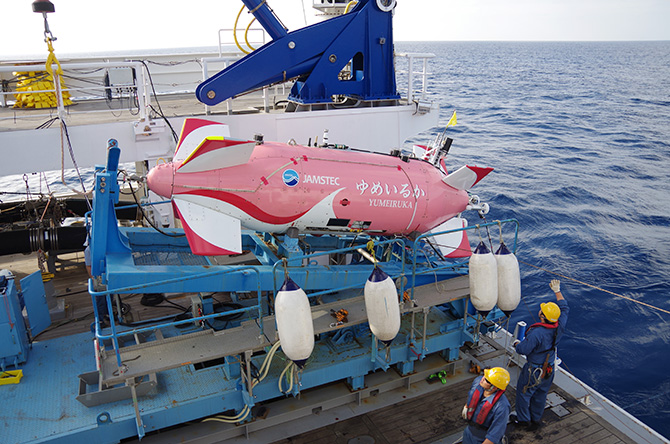
図2-2. AUV「ゆめいるか」
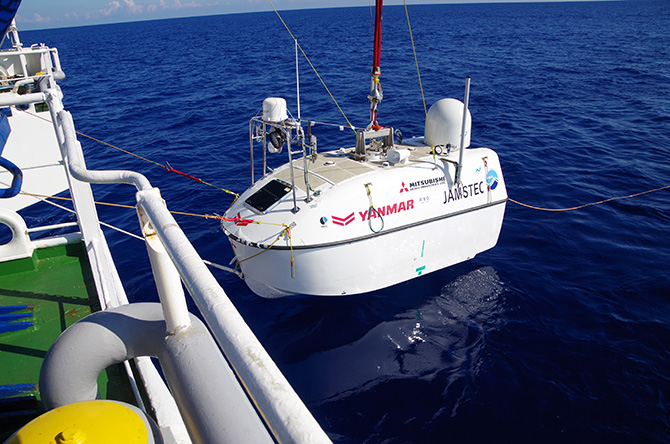
図2-3. 洋上中継器
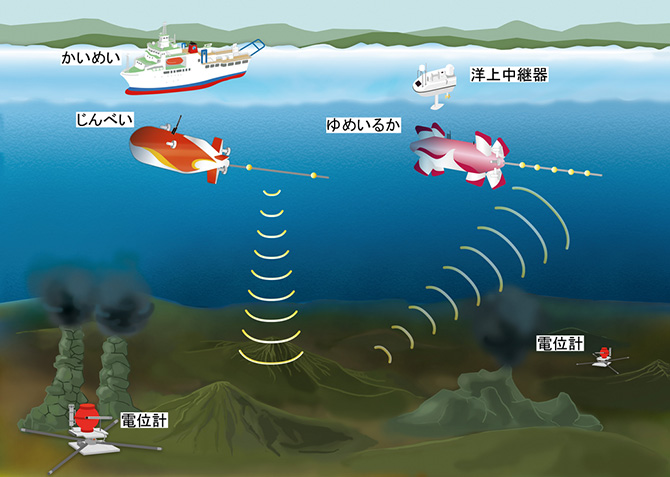
図3. 調査イメージ図
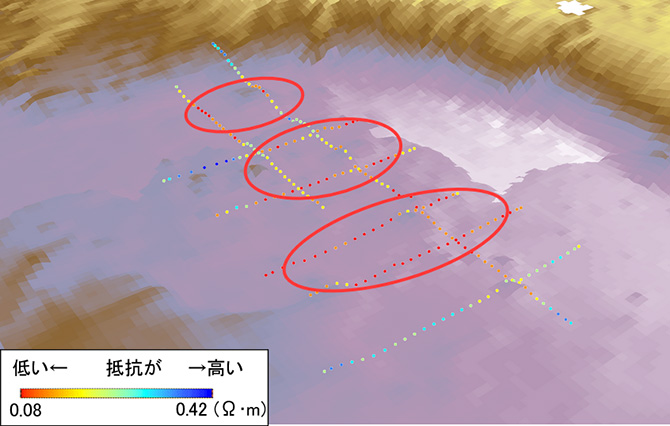
図4. 取得データから計算された見かけ比抵抗分布
見かけ比抵抗は鉱体の近傍で低い値を示す。
図中の赤丸は、熱水鉱床と関連すると推測される低い抵抗値を示す領域。
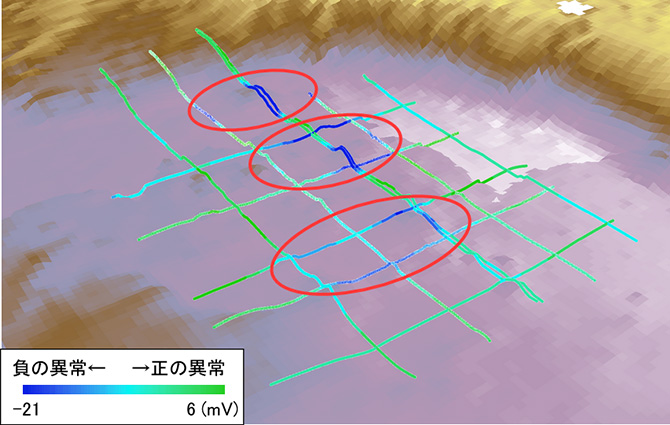
図5. 取得データから計算された自然電位分布
電位は鉱体の近傍で負の異常を形成する。
図中の赤丸は、熱水鉱床と関連すると推測される負の自然電位異常を示す領域。
- 国立研究開発法人海洋研究開発機構
次世代海洋資源調査技術研究開発プロジェクトチーム - (本調査結果について)
成因研究ユニット - ユニットリーダー 鈴木 勝彦
主任技術研究員 笠谷 貴史 - (AUVについて)
AUV複数機システム開発ユニット - ユニットリーダー 吉田 弘
主任技術研究員 百留 忠洋 - (報道担当)
- 広報部 報道課長 野口 剛