話題の研究 謎解き解説
「かいめい」大解明! - 調査研究設備編 -
「かいめい」大解明!前編の推進機関編に続き、本編では、最先端の調査研究設備を紹介します。取材時に行われていた深海探査機の潜航試験の現場もレポートします!
「かいめい」では、どんな研究をするのですか?
柳谷:「かいめい」は海底資源や海底下構造、地震・津波、気象海象など様々な分野の研究を行います。
どうして、そんなに様々な分野の研究ができるのですか?
柳谷:「かいめい」は、目的に応じて調査機器を載せ替えられるように造られているからです(図1)。たとえば資源調査では、「パワーグラブ」や「大型ピストンコアラ―」、「海底設置型掘削装置」など海底試料を採取する装置を搭載します。地殻構造探査では、「地震探査システム」を搭載します。また、海の中を広範囲にわたって航走して海洋観測や海底調査を行う自律型無人探査機(AUV)や遠隔操縦型探査ロボット(ROV)の運用も可能です。
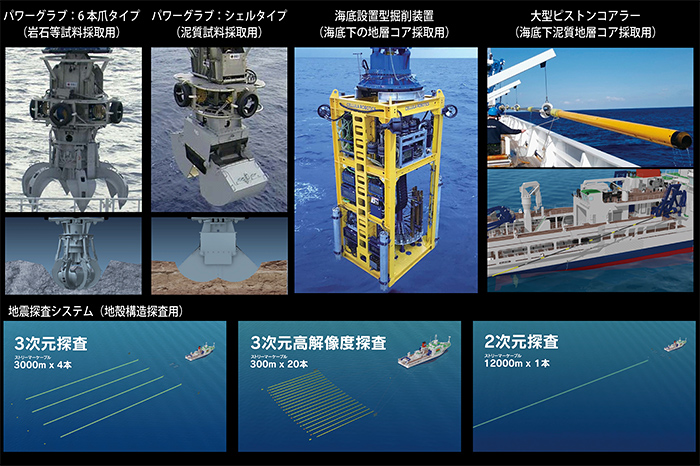
図1 「かいめい」の主な研究装備
柳谷:こうした調査研究を支える船内設備を、これから紹介します(図2)。

図2 本編で紹介するところ
柳谷:まずは後部作業甲板へ行きましょう。作業をしている人がいて危険なので、気を付けてくださいね。
はい、乗船前にボスからも言われているので、くれぐれも気を付けます!
後部作業甲板
後部作業甲板には、機械やクレーン、太いワイヤなどがたくさんありますね。
360度写真1 後部作業甲板(マウスでドラッグしてみよう!)
柳谷:先ほど話した機器の積み降ろしには、本船に装備されている15トン、7.5トン、そして2トンクレーンを使います(写真1)。

写真1 左:2トンクレーン 中:7.5トンクレーン 右:15トンクレーン
たとえば、このように積み込み作業行います。
動画1 クレーンを使った積込時の様子(この取材とは違う航海です)
重いものを積んでも船がびくともしない安定感がすごいです。後部作業甲板も広くてびっくりしました。
柳谷:後部作業甲板は船の構造上の呼び名で上甲板と呼ばれます。JAMSTECの他の船と違い、本船は上甲板の横幅が船尾に向かって広くなっているのが特徴です(図3)。
後部作業甲板を広くすることで、先ほどお話した地震探査システムや各種サンプリング装置、海洋観測機器の積み降ろしから運用まで、様々な作業に対応できます。また、地震探査システムに使うエアガン(図3)を置いても作業スペースが十分に確保できるように設計されています。

図3 エアガン
なるほど。
柳谷:本船には、15トンまで運搬できる「自走式移動台車」もあります。後部作業甲板には格納庫から延びる台車専用のレールがあって、その上を台車が行き来します。
360度動画1 台車が移動する様子(5倍速)(マウスでドラッグしてみよう!)

柳谷:船尾には「船尾Aフレームクレーン」と呼ばれる巨大な青いクレーンがあります。観測機器を吊るして海に降ろしたり、海から回収したりする着水揚収作業に使います(図4)。

図4 後部作業甲板にある自走式移動台車とAフレームクレーン
柳谷:たとえば無人探査機を海に降ろすときは、移動台車に搭載して格納庫から後部作業甲板へ運び、Aフレームクレーンで吊り揚げて、海に降ろすのです。
動画2 Aフレームクレーンを使って無人探査機「ハイパードルフィン」を降ろす様子
(この取材とは違う航海です)
柳谷:Aフレームクレーンの各調査機器を吊り揚げるためのアダプタを付け替えることで、様々な調査機器にも対応します。
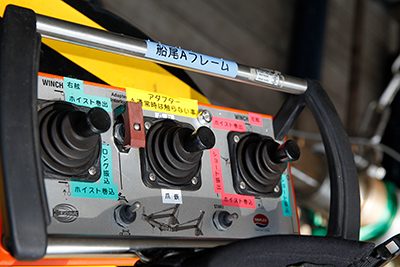
写真2 Aフレームクレーンのコントローラ
Aフレームクレーンは他の船でも見ますが、後部作業甲板にレールがあるのは初めて見ました。
柳谷:はい。JAMSTECの船で後部作業甲板にレールを敷いて自走式移動台車を走らせるのは、「かいめい」だけです。
一般に甲板の種類には鉄甲板と木甲板がありますが、本船は木甲板を採用しました。鉄よりも木の方が、炎天下で作業を行う際に太陽光の照り返しが少なく温度上昇が抑えられるので、作業をしている人の身体への負担がへります。ただ、木は鉄より弱いので、定期的なメンテナンスが必要です。
この後部作業甲板は、格納庫を通じて第3研究室に直結しています。行ってみましょう。
第3研究室
後部作業甲板から第3研究室まで、一直線に来ました。出入り口が、のれん式ビニールカーテンや自動ドアなのですね。
柳谷:調査観測で得られた試料は、正確な分析を行うために早く処理・分析しなければなりません。そこで本船は、後部作業甲板から格納庫を通って、試料の処理・分析を行う第3研究室までを直結させました(図5)。足元に段差は無く、手動ドアも無いので、試料を台車に乗せたまま、後部作業甲板から第3研究室まで一直線に運び込むことができます。また、第3研究室内の床は排水設備が備わっているので、濡れた試料を持ち込んでも問題ありません。
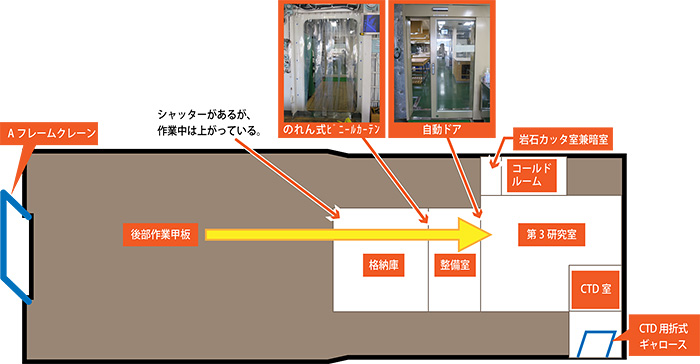
図5 後部作業甲板と第3研究室等のレイアウト
柳谷:第3研究室に運んだ試料は、ドラフトチャンバー(有害な気体が発生する実験などで使う局所排気装置)、超純水製造装置、冷凍庫、恒温器、オートクレーブ(高圧蒸気滅菌器)などを使って処理できます。
360度写真2 第3研究室(マウスでドラッグしてみよう!)
CTD室
第3研究室から別の部屋に続く扉があります。開けても良いですか?
柳谷:大丈夫ですよ。扉の向こうには、CTD・採水装置用の「CTD室」があります(図6)。CTDは海水の塩分、水温、圧力(深度)を計測するセンサーです。CTDを囲むように容量12リットルの採水器が36本あり、12,000mの深さまで採水できます。
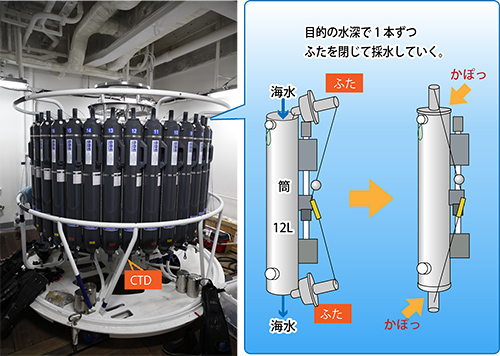
図6 CTD・採水装置
柳谷:CTD室の向こう、つまり本船の右舷には、CTD・採水装置を海に降ろしたり回収したりする「CTD用中折式ギャロース」(門型クレーン)があります(図7)。
第3研究室からCTD室、ギャロースも一直線に並んでいますね。
柳谷:第3研究室からCTD室、ギャロースを一直線に並べることで、海からCTD・採水装置を揚収したら、CTD室で水試料を採水器から小瓶に移し替え、第3研究室にスムーズに運べます。
他の船ではCTD・採水装置専用の部屋やギャロースが無く、後部作業甲板で作業したりAフレームクレーンを使ったりします。本船は、CTD・採水装置専用のギャロースを設けることで作業の効率化を図りました。

図7 CTD用中折式ギャロース
岩石カッター室兼暗室とコールドルーム
柳谷:このほか、岩石試料を処理する「岩石カッター室兼暗室」(写真3左)や、試料を冷蔵・冷凍保存する「コールドルーム」(写真3右)も第3研究室に隣接します。

写真3 左:岩石カッター室兼暗室 右:コールドルーム
研究のしやすさに対するこだわりが詰まっていますね。
第1研究室
柳谷:階段を上がって、ブリッジの後ろにある第1研究室へ行きましょう。第1研究室では、主に音響機器のオペレーションを行います。
360度動画2 第1研究室(マウスでドラッグしてみよう!)

どんな音響機器があるのですか?
柳谷:まず、海底地形図を作るために欠かせない「マルチビーム音響測深機」があります。本船のマルチビーム音響測深機は深海用と浅海用の2周波があり、JAMSTECの他の船よりも大深度の海域を高精度に測深できます。
そのほかにも、水深ごとの流向流速を計測する「音響式流向流速計」、海底下の構造を探る「サブボトムプロファイラー」、海中にある機器、たとえば海底設置型掘削装置や無人探査機の位置を把握する「音響測位装置」があります。
音響機器そのものは、船底にある少し突出したドーム状のソーナードームという場所に配置されています(図8)。
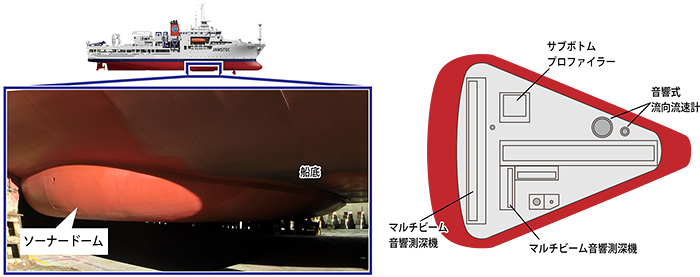
図8 左:横から見た船底ドーム 右:ソーナードーム内の配置図
第1研究室がブリッジに近いのは、何か理由があるのですか?
柳谷:音響機器による情報は、調査研究航海を安全かつ正確に行う上で非常に重要なので、第1研究室はブリッジの近くに設けました。そうすることで、たとえばAUVやROVが潜航している際はその位置情報や機器情報を、ブリッジにいる船長も逐次把握しやすくなります。そうして船長は気象海象も考慮しながら「かいめい」を最善の状態に操船するための様々な判断をするのです。
こうした音響機器のオペレーションを行う部屋は、JAMSTECの他の船でもブリッジの近くにあります。第1研究室ではなく、総合指令室とも呼ぶ船もあります。
表層海水分析室
柳谷:階段を降りて表層海水分析室へ行きましょう(写真4)。表層海水分析室は船底に近く、かつ船首の方に位置し、船の前のフレッシュな海水をそのまま取り込んで水温、塩分、溶存酸素などを計測します。

写真4 表層海水分析室
それぞれの研究機器の役割を理解し、性能をきちんと発揮するように配置されているのですね。研究のしやすさに対するこだわりも感じました。
柳谷:その通りです。では、後部作業甲板に戻りましょう。
「じんべい」が潜航試験中!
Aフレームクレーンで何かがつり上げられようとしています(写真5)!
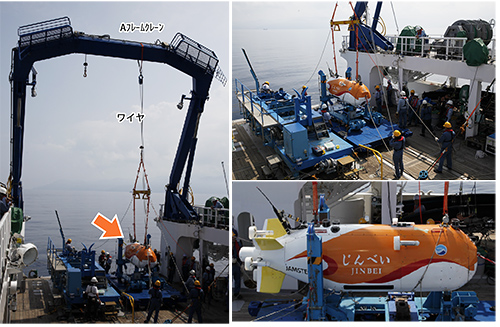
写真5 Aフレームクレーンでつり上げられようとしている物体は、なんだ!?
柳谷:あれは自律型深海探査機「じんべい」です。予めコンピュータに設定したルートに沿って調査観測する、自律型無人探査機(AUV)の一つです。
動画3 「じんべい」着水作業の様子
柳谷:潜航試験の指揮を執る首席研究者の吉梅剛さん(写真6)に、お話を聞きましょう。

写真6 首席研究者の吉梅剛グループリーダー
吉梅:お疲れ様です。まずは「船上制御装置」コンテナへ行きましょう。
船上制御装置コンテナ
吉梅:あれが「じんべい」の「船上制御装置」コンテナです(写真7)。

写真7 船上制御装置コンテナ
船上制御装置コンテナの重い扉を開けて中に入ると、所狭しと機材やコンピュータが並び、男性が真剣な眼差しでモニターを見つめています。しーんと張りつめた空気で、緊張します(写真8)。

写真8 左:船上制御装置コンテナ内の様子 右:「じんべい」の情報を表示するモニタ
吉梅さん、「船上制御装置」コンテナとは、何をする場所なのですか?
吉梅:「船上制御装置」コンテナには、「じんべい」の制御に必要なコンピュータやモニターなどがあります。簡単に言えばラジコンのように「じんべい」を遠隔操作したり、自律航行している場合は「じんべい」から送信されてくる各種のデータを確認したりする、いわばコントロールルームのような場所です。
いま、何をしているのですか?
吉梅:「じんべい」があらかじめ設定したルートに沿って自律して航行できるか潜航試験をしています。
「じんべい」は、自分がどの方向にどれだけ進んでいるかを”自分で”計算しながら進まなければなりません。しかし、その計算結果は本当の値とずれてしまう可能性があります。
そこで、「じんべい」の潜航中は、深さ3,000mにいる「じんべい」の上を本船が走りながら(図9)、本船の音響測位装置で「じんべい」の現在位置(緯度経度の値)を算出します。この現在位置を、「じんべい」から送られてくる“慣性航行装置”の現在位置と比較します。ずれがあれば本船の音響測位装置で計測した現在位置に補正させるように、船上制御装置から「じんべい」に指示を送ります。
同時に、本船と「じんべい」がちゃんと音響通信できているかも確認します。
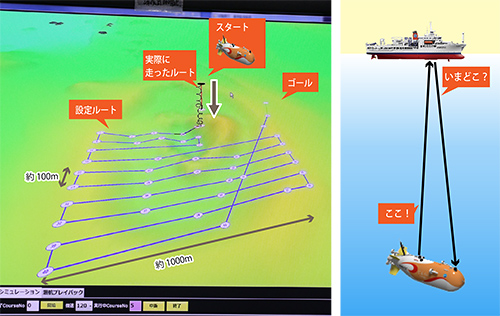
図9 左:「じんべい」のコンピュータにあらかじめ設定したルート 右:本船と「じんべい」の通信イメージ
「かいめい」で無人探査機を運航するのは、いかがですか?
吉梅:今回初めて本船で「じんべい」のオペレーションを行っていますが、これまで運用実績のあるJAMSTECの船と特に変わりなくオペレーションが行えています。着水揚収もちゃんとできますし、船上制御コンテナも問題ありません。
いま試験している自律航行も音響通信も、ちゃんとできています。
「かいめい」で「じんべい」を問題なく運用できることが確認できたのですね。潜航試験もうまく行っていてよかったです。吉梅さん、ありがとうございました。
柳谷さん、「じんべい」の揚収作業も見たいです。
柳谷:潜航試験が終わるまで数時間待ちましょう。
動画4 「じんべい」揚収作業の様子
はー。潜航試験の現場は迫力がありましたし、みなさんがそれぞれ作業を分担し、テキパキとこなす姿が印象的でした。
柳谷:今回見学した航海は、様々な調査研究をこなす「かいめい」の一端です。繰り返すようですが、「調査研究にあわせて機器を載せ替え、集めた試料はすぐに研究室で処理・分析できる」、これが本船の強みです。これによって本船は多機能研究船としての力を発揮するのです。