話題の研究 謎解き解説
無人探査機「ハイパードルフィン」
2,000回潜航、達成!
【目次】
▶ 祝、2000回潜航達成
▶「ハイパードルフィン」の活躍の軌跡
▶「ハイパードルフィン」が幕を上げた深海探査の新時代
▶「ハイパードルフィン」の誕生
▶ 進化し続ける「ハイパードルフィン」
「ハイパードルフィン」の誕生
「ハイパードルフィン」は、どのように誕生したのか。その建造当時から携わる内田徹夫さんにお話を聞きます。

写真10 内田徹夫さん
1982~1987年有人潜水調査船「しんかい2000」のパイロット、
1987年~1997年「ドルフィン-3K」のパイロット
「ハイパードルフィン」の建造当時のお話を聞かせてください。
内田:「ドルフィン-3K」が開発された1982年頃は日本も海外の建造メーカーも無人探査機の製造技術のレベルはほとんど変わりませんでしたが、「ハイパー」の開発計画が始まった1998年頃になると、3,000m級のROVについては海外メーカーの方が技術力やコストの面で有利な状況になりつつありました。海外のメーカーは各国のサルベージ会社や海洋研究所、海洋調査会社、海軍など世界的な市場を相手に数多くの無人探査機の納入実績がありました。
我々は国内外のメーカーを比較検討した結果、入札を経て、無人探査機において確かな技術を誇るカナダのISE(International Submarine Engineering Limited)で「ハイパー」を建造することにしました。私はずっと担当を務め、「ハイパー」の建造中はカナダと日本を何度も往復しました。
<ISEの工場内におけるビークル(機体)の建造>
 |
写真11 溶接作業中のフレーム。下はアルミのフレーム、上はスキッド。上下ひっくり返した状態。 |
 |
写真12 油圧モータとスラスタの取り付け。 |
 |
写真13 フレームとペイロードスキッドの調整作業。 |
 |
写真14 浮力材の合わせこみ。 |
<艤装品の製作>
 |
写真15 溶接作業中のフレーム。下はアルミのフレーム、上はスキッド。上下ひっくり返した状態。 |
 |
写真16 ケーブルを6周巻くことでケーブルににかかる荷重を分散させるトラクションウィンチ。 |
 |
写真17 母船とビークルをつなぐケーブルと、ケーブルを巻くストレージウィンチ。約5000mのケーブルが巻かれている。 |
建造中に印象に残ったことは何ですか?
内田:カナダISE社の工場試験の後に、近くにある湖(フレイザーリバー)で行った性能確認試験が印象的でした。「リサーチャー」という名前の試験台船に、「ハイパー」の運用で使うコントロールバン、ウィンチ、発電機などの実機を配置して、実際に水中でビークルを動かす試験です。この中で、ビークルの推進力の試験ではビークルと「リサーチャー」を索(さく)でつないで引っ張るというようなかなり乱暴な試験も行いました。

写真18 左 「リサーチャー」 右:水面に見える「ハイパードルフィン」
え、「ハイパードルフィン」で船をまるごと引っ張るんですか!?
内田:はい、「ハイパー」はそれほどの推進力があります。「なつしま」(全長67.3m、国際総トン数1,739トン 2016年退役)も引っ張れたと思います。このほか、各種の性能確認試験や24時間の耐久連続運転などの試験も行いました。
様々な試験を経て「ハイパー」は1999年に横須賀本部に納品されました。そこから日本で開発した機材をビークルに搭載して、相模湾・駿河湾などで性能確認試験潜航を行いました。本格運用が始まったのは、2000年6月のことです。

写真19 横須賀本部の整備場で完成された「ハイパードルフィン」
「ハイパードルフィン」の名の由来は何ですか?
内田:「ドルフィン-3K」の後継機として、そして優れた無人探査機になるように「ハイパードルフィン」と命名しました。実は所内で短期間ではあるものの名称を公募しましたが、当時は皆かなり忙しい時期で応募がなかったため、関係者と相談して決めました。
完成当時、「ハイパードルフィン」の画期的なポイントは何でしたか?
内田:超高感度ハイビジョンカメラ、その映像を見るコントロールルーム、そしてビークルの動力性能です。順番に説明しましょう。
無人探査機は目が良くないと話になりません。高品質の映像を撮影するために、NHKと共同開発した高感度撮像管(スーパーハープ管)を組み込んだ「超高感度ハイビジョンカメラ」を装備しました。
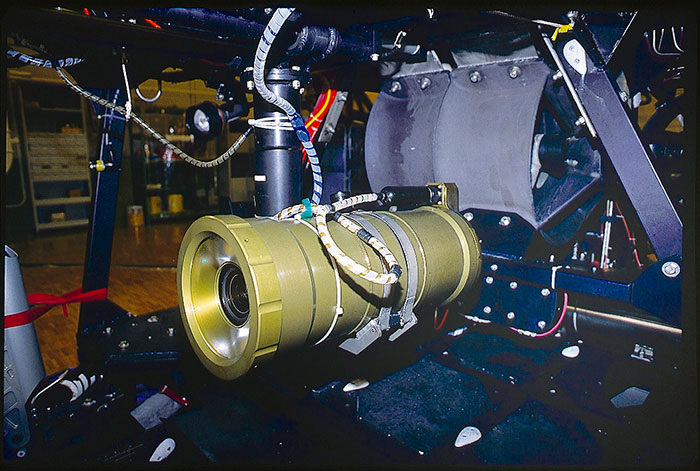
写真20 高性能且つコンパクトを実現した高感度ハイビジョンカメラ
内田:その当時のCCD素子を用いたビデオカメラでは、解像度を上げると画素が小さくなる分、光の利用効率が落ちて映像が暗くなってしまいました。このスーパーハープ管なら、感度を上げても画質の劣化はほとんどありません。また、高感度な分、レンズを絞りこむことができるため被写界深度が大きくなり、近くから遠くまで幅広くピントが合った立体感のあるハイビジョン映像を得られる様になりました。
リンズィーさんが絶賛していた映像を撮影したビデオカメラですね!
内田:映像を美しく撮るためには照明(ライト)を適切にあてることも必須です。しかし、光源と同じ方向からビデオカメラで撮影すると、被写体との間にある水中の懸濁物の反射が強く被写体が見えづらくなってしまいます。そこで、観音開きに180度展開するライトブームを取り付けて、ビデオカメラとライトの角度を大きくできるように工夫しました。

写真21 ビデオカメラとライトの角度を大きくするライトブーム。180度展開できる。
ライトの当て方まで変えられるようにするとは…!
内田:では、そのハイビジョン映像を何に表示するか。映像はリアルタイムで船上のコントロールルームに届けられます。コントロールルームとは、「ハイパー」の遠隔操作に必要なコンピュータやモニターなどを配置したコンテナです。
ここで私が検討したモニターが、フラットパネル型のプラズマディスプレイでした。ところが当時はまだあまり一般に普及しておらず、様々な電波や磁気が飛び交う母船の船上でちゃんと映像が表示できるかもわかりませんでした。そこで私は、プラズマディスプレイを海洋調査船「かいよう」(2016年退役)に取り付けて、本当に映像がちゃんと映るか確認しました。また、空のコンテナの壁にプラズマディスプレイを模した段ボールを掛けて、画面との距離やパイロットや研究者のためのシートの配置をイメージしたこともありました。最終的にいけそうだと判断して、フラットパネル型の大画面のプラズマディスプレイを6基設置し、収録装置は画質を維持できるハイビジョンデジタルVTRにしました。

写真22 建造時のコントロールルーム
そうだったのですね。
内田:次に、ビークルの動きについてです。ビークルの動き、つまり推進力も大切です。私は横移動の推進力にこだわりました。
横移動?なぜですか?
内田:「ドルフィン-3K」で横移動の重要性を痛感していたためです。海底で「ドルフィン-3K」が横へ移動するには水平方向のスラスタ2基を使って、片方を前方向、もう片方を後ろ方向へ回転させビークルを回頭させていました。これだと海底の泥を巻き上げて視界が悪くなることも多く、目標の対象物を見失ったことも多々ありました。また、揚収時に海面でビークルを母船の揚収クレーンの真下まで移動させるには、もっと横方向の推進力が欲しかったのです。
そこで「ハイパー」には、75馬力の電動油圧モータで駆動する大型スラスタを6基装備しました。さらに、装備品を上下に配置することで、ビークルそのものを横方向に水が流れやすい構造にしました。その結果、当時としては速い約2ノットの横移動が実現しました。
そうだったのですね。
内田:このほか、ビークル下部のペイロードスキッドは、わずかボルト8本で着脱してスキッドごと別の調査機材と交換できるようにしました。
この構造を生かして「ハイパー」は、建造当時のままではなく進化を続けています。改造については大野運航長にぜひ聞いてください。