DEEP TOW
A towed, mission-configurable, research platform
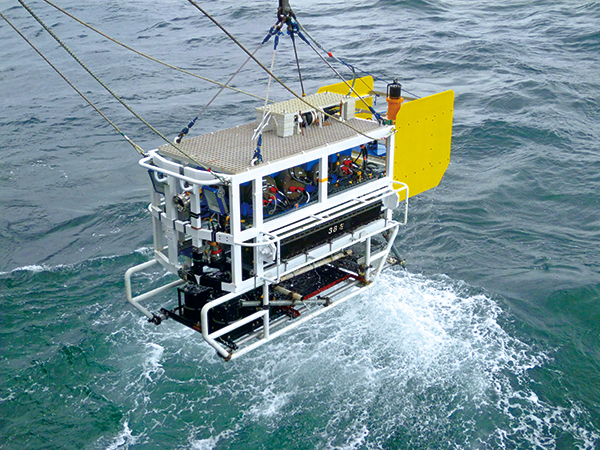
DEEP TOW is a fully customizable research platform that is towed behind a mother-ship by a set of payload/power & communication cables. Depending on the mission requirements, DEEP TOW can survey a wide area of the ocean, or the sea floor.
The power & communications cable allows for real-time data collection, while also providing power to all the sensors and equipment on board. The simple construction & lack of propulsion systems means that this platform can be fully configured with all kinds of sensors tailored to the desired research requirements.
These include, but are not limited to: high-definition cameras, still cameras, LED lights, and acoustic observation equipment, such as multi-beam echo sounder and side-scan sonar.
Deep Tow can be used not only for biological surveys and preliminary investigations for submersible safety, but also for topographical / geological and seafloor resource surveys.
6K Sonar, DEEP TOW(6KSDT)