Upcoming Technologies in Marine Robotics
Accelerating the Efficiency and Automation of Oceanographic Observations
 Automatic Oceanographic Surveying without research vessels.
Automatic Oceanographic Surveying without research vessels.
The ability to directly observe the oceans in human occupied research vehicles is very important, and there are many kinds of direct observation and sampling can only be properly conducted by direct human participation in the water. JAMSTEC continues to support all these activities.
The recent introduction of autonomous underwater vehicles (AUV) allow long-term and continuous surveys and sampling, but they still require a human occupied research vessel, or mother ship, and are dependent on the mother ship’s schedule.
AUV launch and recovery work requires a lot of labor, and are therefore still costly; there remain many other challenges to becoming a truly “unmanned observation system”.
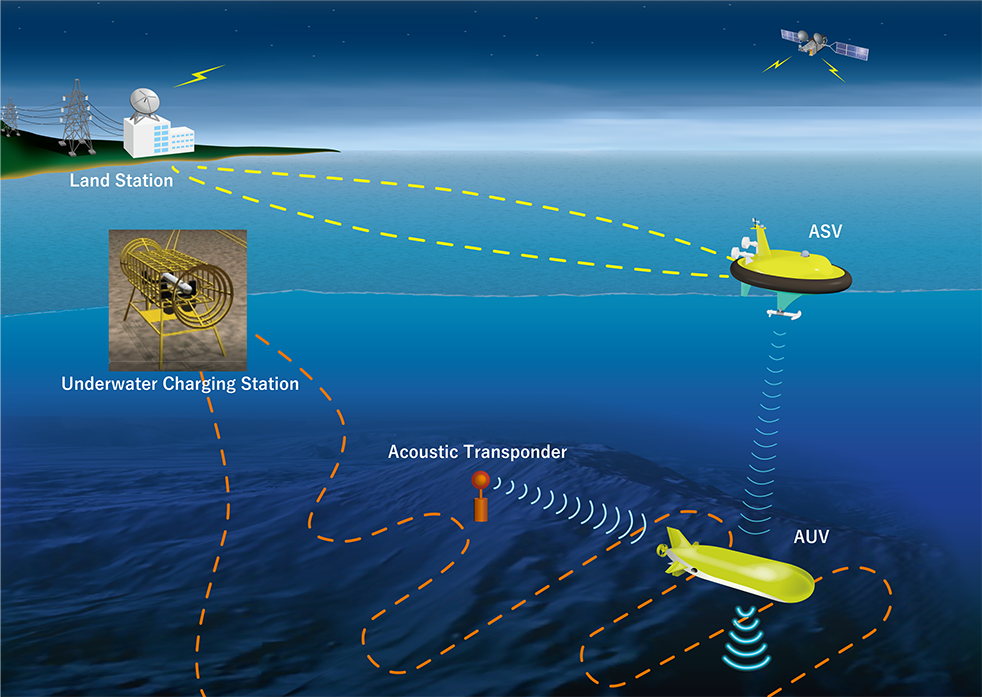
Our goal is to implement a completely automated observation system that from start to finish directly accesses the survey area from the coast using AUVs, ASVs, submarine stations, etc. without the need for crewed ship support. These kinds of low-cost, continuous observation systems will enhance our understanding of the dynamic ocean, while also reducing labor needs and enhancing operator safety.
A New Breed of Cable-Free Deepwater Vehicles
 Concept of the Landing (Docking) Station and Compact Vehicle.
Concept of the Landing (Docking) Station and Compact Vehicle.
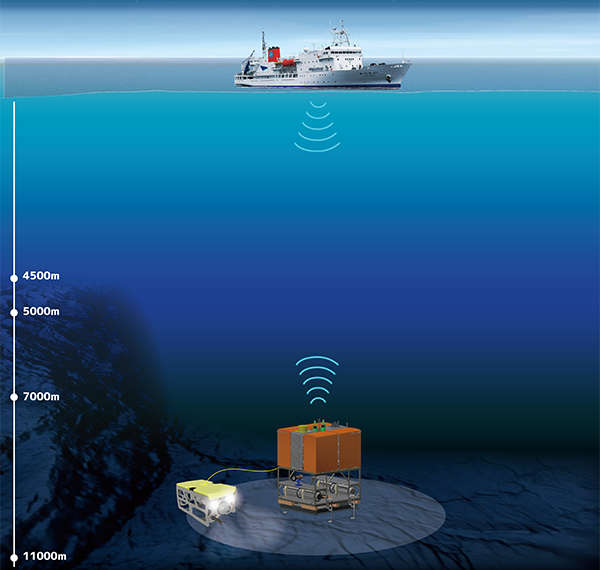
Underwater research and maintenance work by underwater vehicles like ROVs are typically connected to the mother ship by a long and heavy umbilical cable that facilitates communication and power. MarE3 plans to develop a new breed of an umbilical-free underwater drone system that should significantly cut cost related to maintenance, subsea observations and surveys. The new concept of underwater drones will make effective use of seafloor docked vehicles and hovering AUVs equipped with battery packs and acoustic communication technology as standard.
Our work focuses on technologies that improve battery capacities and boost the distance and speed of underwater acoustic communication.
Ultra-Deepwater Autonomous Underwater Vehicle (AUV)
 Japan Trench Earthquake Zone.
Japan Trench Earthquake Zone.
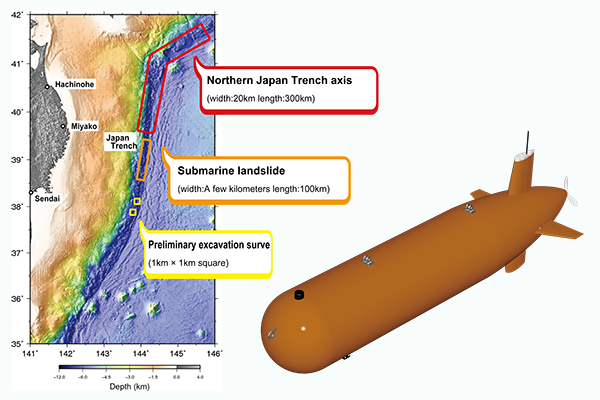
MarE3 is developing a new ultra-deepwater Autonomous Underwater Vehicle (AUV) that can operate at maximum depths of 8,000 meters capable of obtaining detailed seafloor bathymetric maps and data from various sensors. The proposed AUV will aid researchers' investigations of the earthquake zone in the Japan Trench area.
MarE3 is also planning to develop dedicated unmanned surveillance systems to study extremophiles, physical oceanography, and many others.
Open Software & On-Board Payloads Standardization Concept
 AUV software openness concept.
AUV software openness concept.
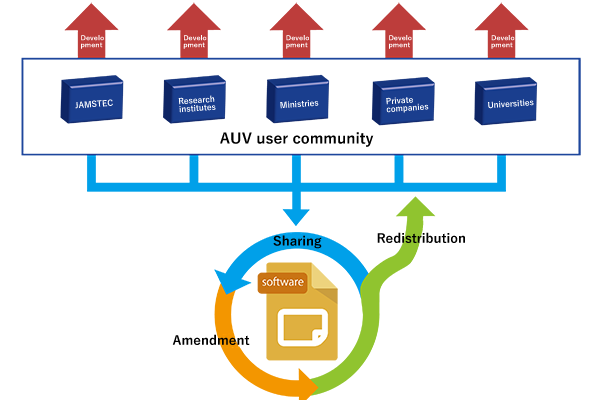
JAMSTEC endeavors to create an Autonomous Underwater Vehicles (AUV) community that will accelerate the development of smart navigation systems and on-board applications for AUVs. Collaboration and ideas exchange will promote the standardization of AUV-equipped tools, operating software and communications within the community.
Development Team
- Takao Sawa
- Takeshi Nakatani
- Tsuyoshi Yoshiume
- Yoshimori Sanada
- Fumitaka Sugimoto
- Yosaku Maeda
- Hitoshi Kakami
- Tatsuya Aso
Management Team
- Kenji Nagahashi
- Hiroshi Yoshida
- Hiroyuki Osawa
- Masanori Kyo