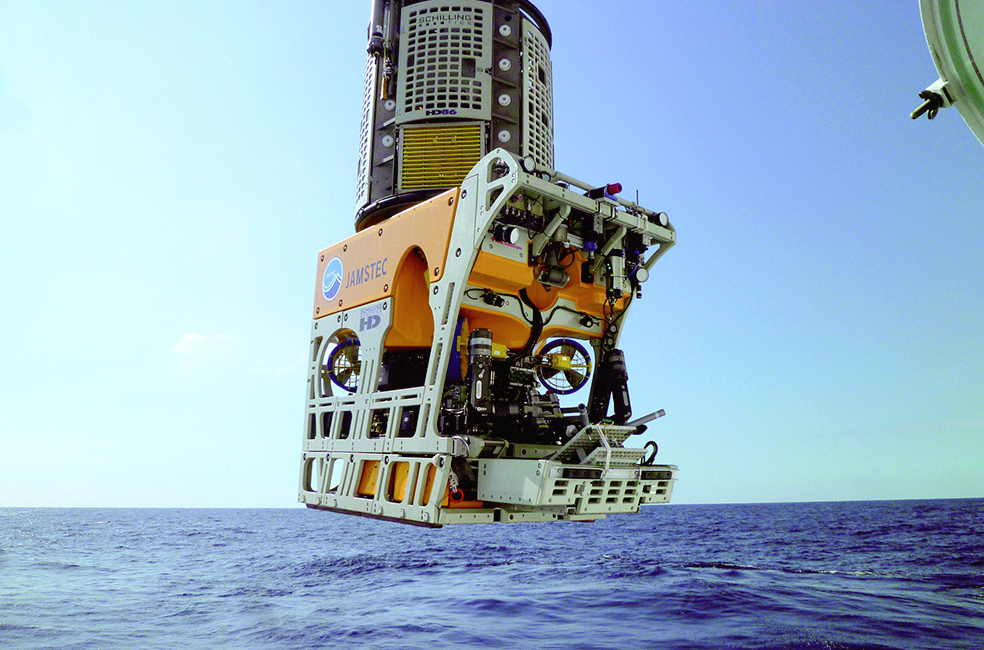
無人探査機「KM-ROV」
自動制御で操縦者をサポートする無人探査機
海底広域研究船「かいめい」を母船とする無人探査機です。「かいこう」など他の探査機と同じように、海底に着底した状態でマニピュレータを使った作業を行うことができます。機体下部のサンプルバスケットは収納することができるので、マニピュレータを使用するときに手元の作業がしやすくなっています。 また、機体の位置や姿勢を自動で制御することにも優れています。自動制御には深度や高度、速度などのセンサデータが使用されており、潮流がある場合でも流されずに姿勢を安定させることができます。カメラで生物などを観察するときには定点保持することもできるほか、指定した距離を進むごとにとまってサンプリングするといった使い方もできます。
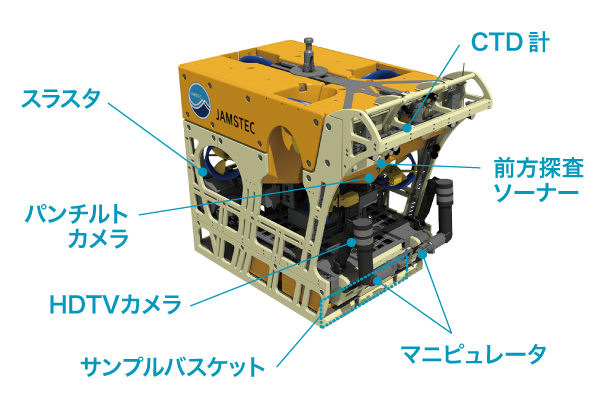
主要設備
 「かいめい」船上のコンテナ内の操縦盤
「かいめい」船上のコンテナ内の操縦盤