話題の研究 謎解き解説
無人探査機「ハイパードルフィン」
2,000回潜航、達成!
【目次】
▶ 祝、2000回潜航達成
▶「ハイパードルフィン」の活躍の軌跡
▶「ハイパードルフィン」が幕を上げた深海探査の新時代
▶「ハイパードルフィン」の誕生
▶ 進化し続ける「ハイパードルフィン」
進化し続ける「ハイパードルフィン」
「ハイパードルフィン」は運用開始以降も、常に進化を続けています。
当初3,000mだった最大潜航深度は4,500mになり、母船の変更に伴いコントロールルームも新たにつくりました。ハイビジョンカメラの変更や投光器のLED化など、技術の進化に伴う変化も数多くあります。
再び、「ハイパードルフィン」の活躍を支える大野運航長にお話しを聞きます。
大野運航長、「ハイパードルフィン」はどんな改造がされてきたのですか?
大野:技術が進むごとに「ハイパー」は機器を入れ替え、進化してきました。一部を紹介しましょう。
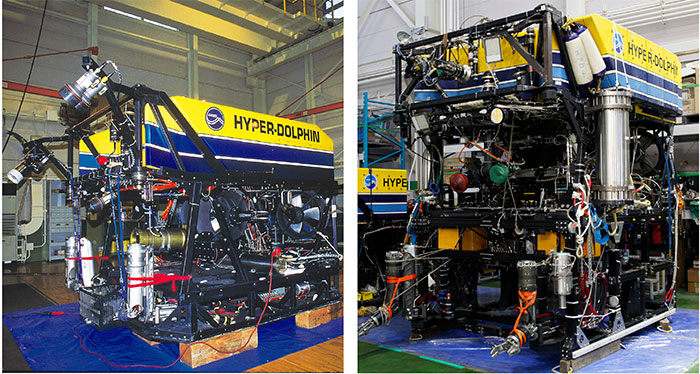
写真23 左:1999年建造時 右:2017年現在
| 2010年 | 最大潜航能力 | 最大潜航深度は水深3,000mであったが、4,500mまでのばした。 |
| 2010年 | 主浮力材 | ビークルが水中で移動しやすいように中性浮力にするもの。水深4,500mまで潜航するためにその深度に耐えられるものに改良された。 写真24 |
| 2011年 | スキッド | ビークル下部の部分で、マニピュレータやサンプルバスケットなどを取り付ける。従来より40㎝高いスキッドに交換した。Phins(慣性航法装置)を取り付け、ペイロードの搭載量も増やすことができた。 写真25 通常用のスキッド  写真26 DONETの構築作業に使うスキッド |
| 2012年 | メインカメラ | スーパーハープ方式からCMOS方式のハイビジョンカメラへ変更。技術が進み、CMOS方式でも十分に画質が良くなったため、スーパーハープ方式よりも調整しやすく維持費もかからないCMOS方式に変えた。小型軽量化もできた。 写真27 |
| 2012年 | サブカメラ | CCDカメラから、メインカメラと同じハイビジョン、CMOSカメラに変更。格段に綺麗な映像が撮れるようになった。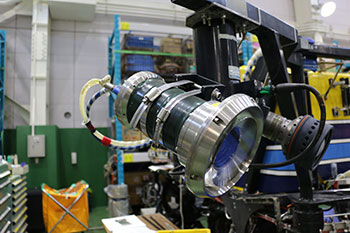 写真28 |
| 2016年 | ビデオ キャプチャー装置 |
メインカメラ・サブカメラ共にハイビジョン画質のままでキャプチャー(停止録画)できるようになった。 |
| デジタルカメラ | 従来のデジタルカメラを、日本海洋事業(株)がオリンパス(株)と開発したものに交換した。細かな調整が可能になり、より鮮明で高画質の画像が撮影できるようになった。 写真29 |
|
| 2016年 | 伝送装置 | コントロールバンから指示した通りにビークルを動かしたり、逆に撮影映像をビークルからコントロールバンに送るためのコンピュータ。光制御ラインが1系統のみであったが、2系統になり、万が一1系統に不具合が生じてももう1系統で通信が可能となった。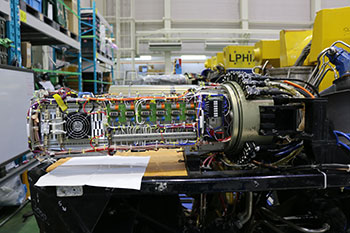 写真30 |
| サンプルバスケット | 機材を積み込んだり、採取したサンプルを入れたりするところ。従来は外注した1個だけだったが、オペレーションチームがサイズ違いを自作。調査に合わせて使い分けられるようになった。 写真31 32 |
|
| 2016年 | コントロールバン | 建造当初は幅が3mを越えていた20フィートコンテナだったが、市販品20フィートコンテナで新たに作った。以前は横幅が大きく公道を通れなかったが、小型化により公道を通って運べるようになった。横須賀本部の岸壁だけではなく、別の場所でも船にコンテナを積み込み・積み下ろし作業が可能になった。 写真33 従来はコントロールルーム内でオペレーションチームと研究者が一緒に映像を見ていたが、現在は研究者は別の部屋(研究室)から見る。人数制限がなくなり、研究者間のコミュニケーションはスムーズになった。 |
| 2017年 | 水中投光器 | 深海を照らす光源。前方をメタルハライド投光器5灯で照らしていたが、そのうち2灯をLED投光器に変更した。メタルハライドライトに比べLEDの方が明るく、軽く消費電力も少ない利点がある。将来的には配置配分を変えて、後方や機材監視用にライティングすることも検討中。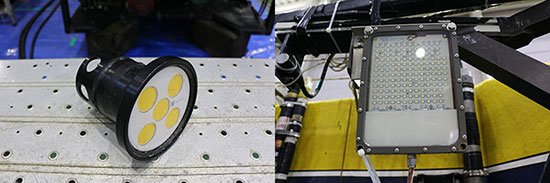 写真34 35 |
いろいろな改造がされてきたのですね。
大野:はい。こうした改造ができたのも、建造時の基本設計が良かったためだと思います。
建造時のこだわりが、今につながっているのですね。
大野: 無人探査機の技術はどんどん進んでいます。最新のものは、ボタン一つで数㎝の移動やホバリングが可能で、簡単に操作できます。それに対して「ハイパー」は、コントローラを使ってパイロットが操作するので、移動もサンプリングもパイロットの腕次第です。その分、パイロットの手でその瞬間の状況に応じた微調整ができるので、最適なオペレーションが実現します。
「ハイパー」は、いわば無人探査機の原点です。今後も運航を続け、技術を継承していくことが大切だと思います。「ハイパー」は、我々がしっかりメンテナンスしているのでまだまだ活躍できます。
応援しています。ありがとうございました。

写真36 2017年3月現在のオペレーションチーム